



















258 Chapter 6. Function Reference
Description
The H
∞
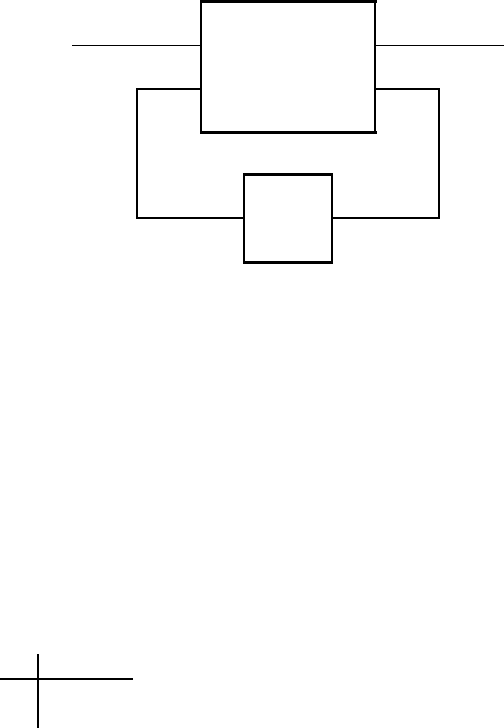
(sub)optimal controller for the interconnection, p, is calculated. The resulting
closed loop system is illustrated below.
p
k
-
zw
y
u
The variables ncon and nmeas are used to specify the dimensions of u and y in the above
diagram (ncon = dim(u)andnmeas = dim(y)). The objective is to design a stabilizing
controller, k, which minimizes the H
2
norm of the closed loop system between w and z.
The closed loop system can be formed with the command,
clpsys = starp(p,k).
p is a state-space system, which can be partitioned with respect to [z; y]and[w;u]in
the following way.
p =
a
b
1
b
2
c
1
d
11
d
12
c
2
d
21
d
22
.
The following assumptions must hold: