



















62 CHAPTER 2. OVERVIEW OF THE UNDERLYING THEORY
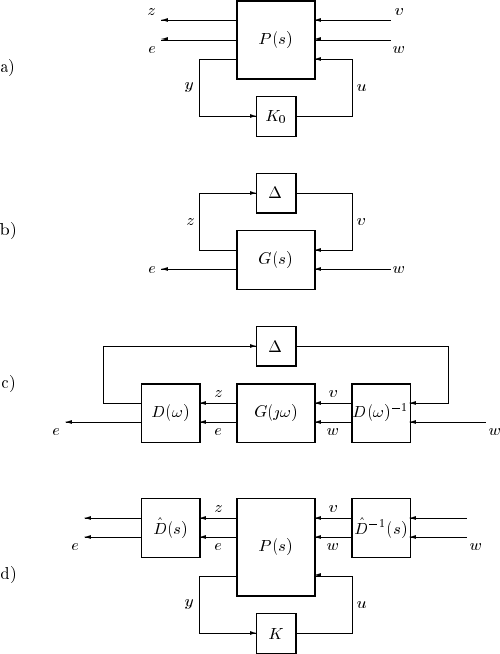
Figure 2.12: D-K iteration procedure: a) Design H
∞
(or other) controller: K
0
(s)[step
i)]. b) Closed loop perturbed system for µ analysis [step ii)]. c) Frequency by frequency
upper bound D(ω) scale approximation to µ analysis [step iii)]. d) Scaling of H
∞
design
problem by
ˆ
D(s)where
ˆ
D(ω) ≈ D(ω)[stepsiv)&v)].