



















2.5.3 Initial_high, active_low Interrupt source
If the P2C0 is an initial_high, active_low signal, the interrupt service routine
should use INV0 to invert or not to invert the P2C0 for high_pulse generation as
follows: (Refer to DEMO4.C)
Initial set:
now_int_state=1; /* initial state for P2C0 */
outportb(wBase+0x2a,0); /* select the inverted P2C0 */
void interrupt irq_service()
{
if (now_int_state==1) /* now P2C0 is changed to LOW */(a)
{ /* --> INT_CHAN_0=!P2C0=HIGH now */
COUNT_L++; /* find a LOW_pulse (P2C0) */
If((inport(wBase+7)&1)==0)/* the P2C0 is still fixed in LOW */
{ /* Æ need to generate a high_pulse */
outportb(wBase+0x2a,1);/* INV0 select the non-inverted input */(b)
/* INT_CHAN_0=P2C0=LOW --> */
/* INT_CHAN_0 generate a high_pulse */
now_int_state=0; /* now P2C0=LOW */
}
else now_int_state=1; /* now P2C0=HIGH */
/* don’t have to generate high_pulse */
}
else /* now P2C0 is changed to HIGH */(c)
{ /* --> INT_CHAN_0=P2C0=HIGH now */
COUNT_H++; /* find a HIGH_pulse (P2C0) */
If((inport(wBase+7)&1)==1)/* the P2C0 is still fixed in HIGH */
{ /* need to generate a high_pulse */
outportb(wBase+0x2a,0);/* INV0 select the inverted input */(d)
/* INT_CHAN_0=!P2C0=LOW --> */
/* INT_CHAN_0 generate a high_pulse */
now_int_state=1; /* now P2C0=HIGH */
}
else now_int_state=0; /* now P2C0=LOW */
/* don’t have to generate high_pulse */
}
if (wIrq>=8) outportb(A2_8259,0x20);
outportb(A1_8259,0x20);
}
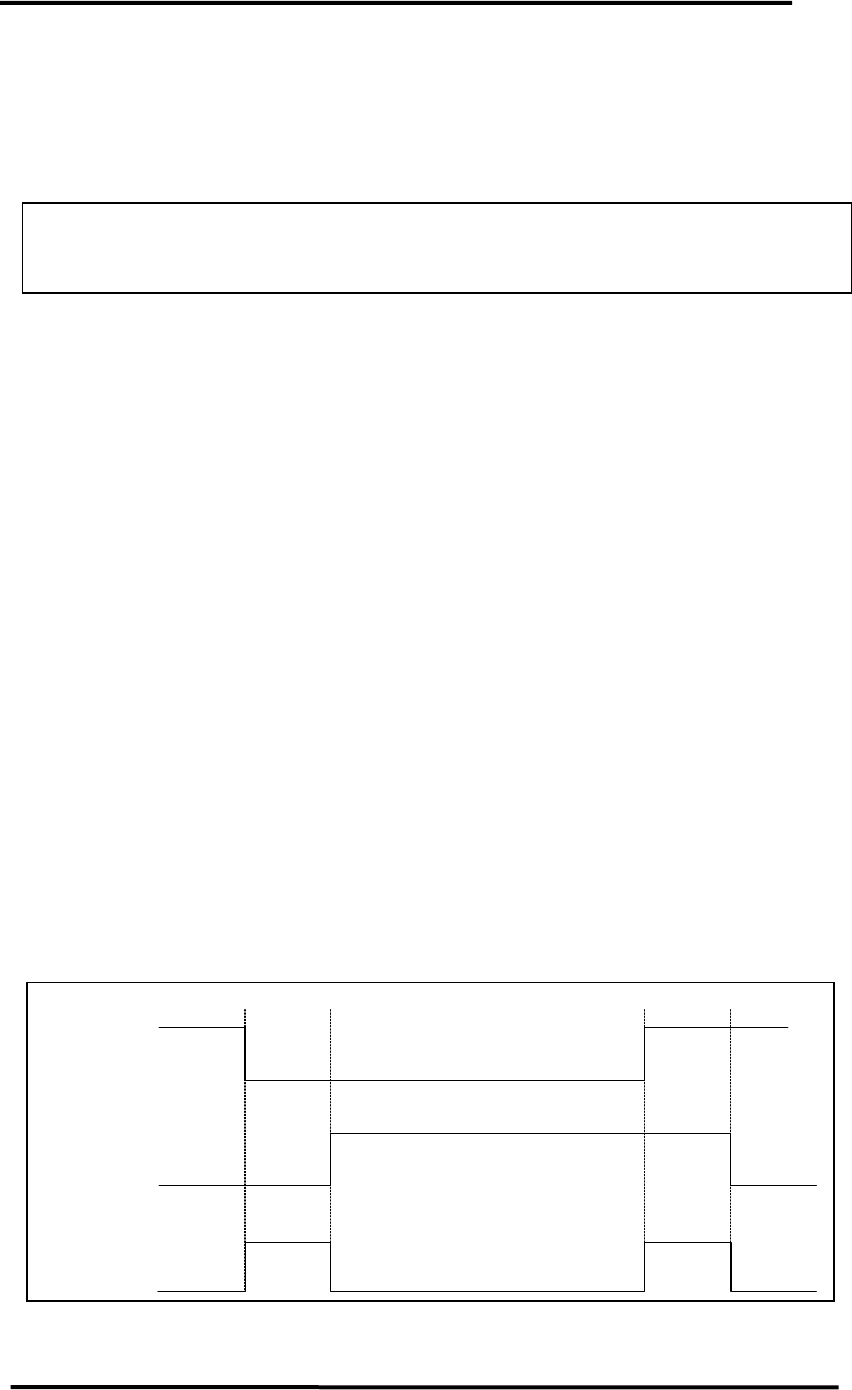
P2C0
INV0
INT_CHAN_0
(a) (b) (c) (d)
OME-PIO-D96 User Manual (Ver.1.1, Mar/2003) ---- 12