



















6-1
CHAPTER 6 Increasing the robot operating speed
1 Increasing the robot operating speed
The robot operating speed can be increased by the following methods.
Use these methods as needed when programming.
(1) Increasing speed by arch motion
[Also refer to:] Robot controller owner's manual
("Axis parameters" – "Arch position" in Chapter 4)
Programming manual
(ARCH statement in "11. Command statements".)
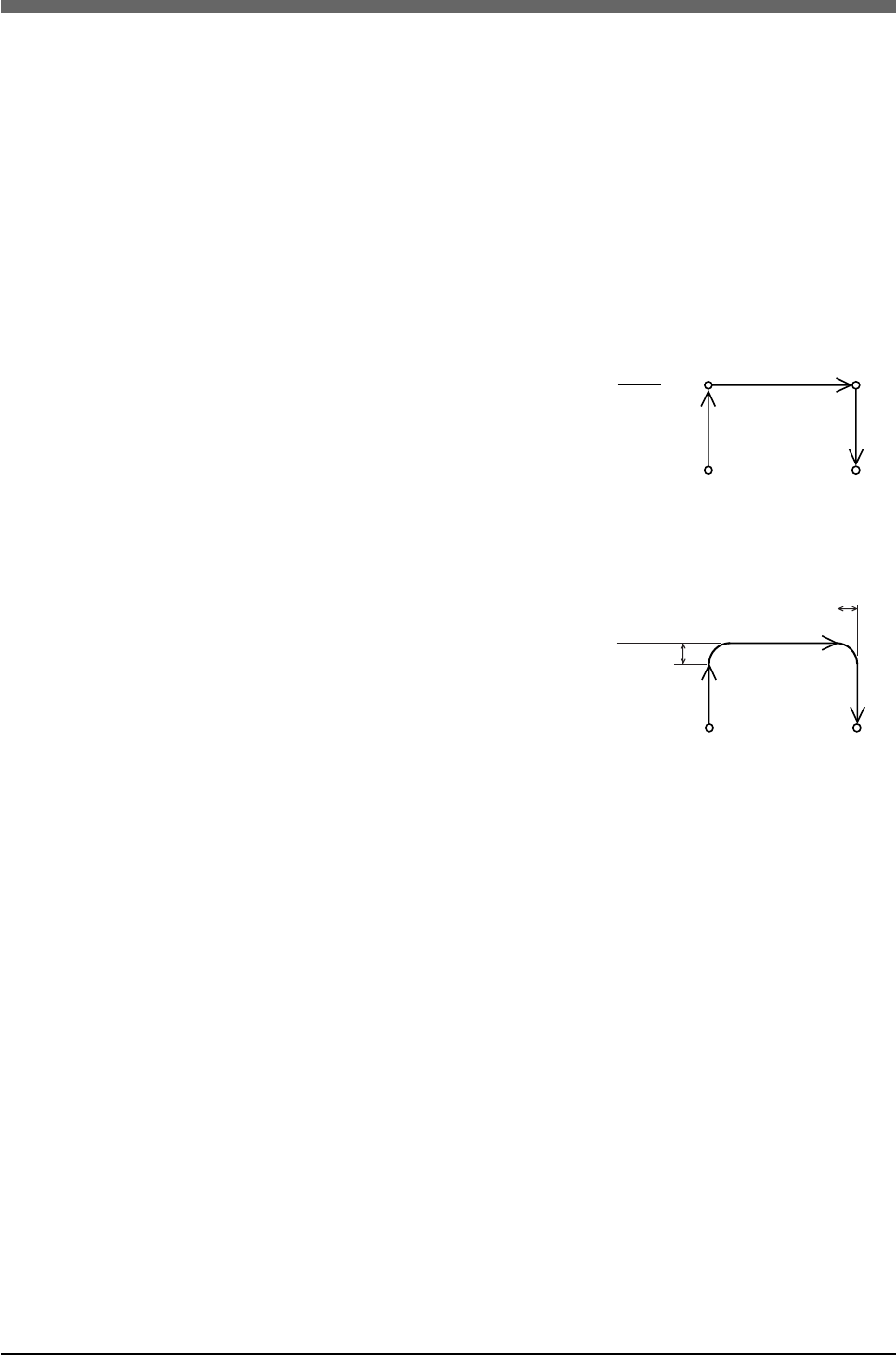
q Gate motion
From point P1 to P4 via P2 and P3:
MOVE P, P2
MOVE P, P3
MOVE P, P 4
w Arch motion: Using default arch position: (2000 pulses)
From point P1 to P2:
MOVE P, P2, Z=0
"Axis parameters" – "Arch position"
M1 (X-axis arch position) = 2000 pulses
M2 (Y-axis arch position) = 2000 pulses
M3 (Z-axis arch position) = 2000 pulses
M4 (R-axis arch position) = 2000 pulses
When the Z-axis moves upward from P1 and enters the M3 arch position range
(2000 pulses prior to Z=0), the X, Y and R axes begin to move. When these 3 axes
enter the M1, M2 and M4 arch position range (2000 pulses prior to P2), the Z-
axis moves downward to P2. Compared with the gate motion q, this arch motion
shortens the cycle time approximately 20% by moving the robot arm along an
arc.
Z=0
P2
P1
P3
P4
Z=0
M1, M2, M4
P1
M3
P2