



















1-8
CHAPTER 1 Using the Robot Safely
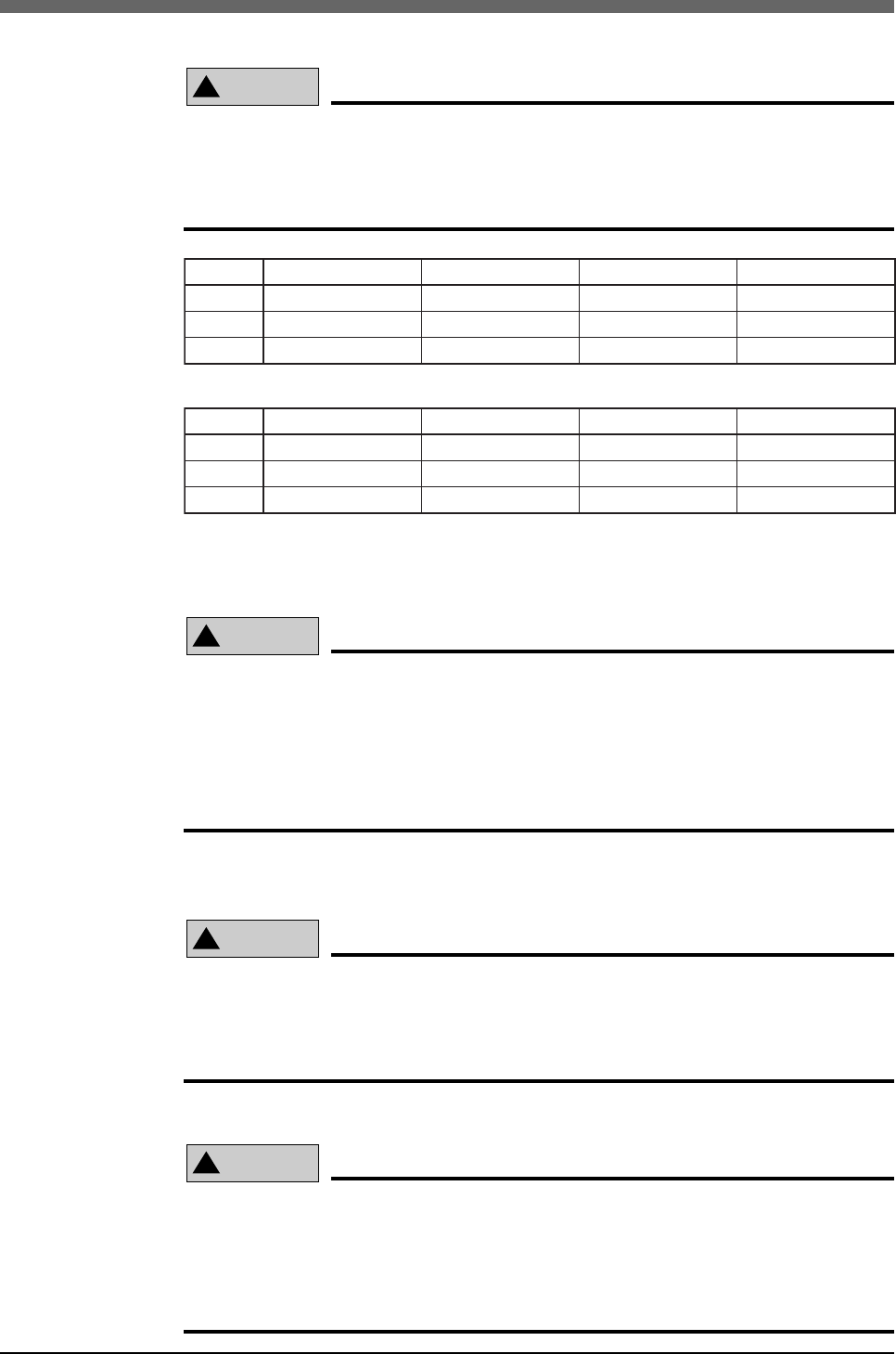
(24) Do not apply excessive force to each section.
!
CAUTION
The YK120X series (YK120X, YK150X) and YK180X series (YK180X, YK220X)
are designed to be compact, so the joints could be damaged if excessive force
is applied, for example, during installation of an end effector. Make sure that
excessive force is not applied to the joints.
Axis
YK120X, YK150X
X-axis
Y-axis
R-axis
Tolerable radial load
100N (10.2kgf)
45N (4.6kgf)
45N (4.6kgf)
Tolerable thrust load
100N (10.2kgf)
45N (4.6kgf)
45N (4.6kgf)
Tol erable moment load
Tolerable torque
1.5Nm (15.3kgfcm)
0.45Nm (4.6kgfcm)
0.45Nm (4.6kgfcm)
1.7Nm (17.3kgfcm)
0.5Nm (5.1kgfcm)
0.3Nm (3.1kgfcm)
Axis
YK180X, YK220X
X-axis
Y-axis
R-axis
Tolerable radial load
275N (28.1kgf)
150N (15.3kgf)
150N (15.3kgf)
Tolerable thrust load
900N (91.8kgf)
600N (61.2kgf)
600N (61.2kgf)
Tolerable moment load
Tolerable torque
6.0Nm (61.2kgfcm)
3.3Nm (33.7kgfcm)
3.3Nm (33.7kgfcm)
9.0Nm (91.8kgfcm)
4.0Nm (40.8kgfcm)
2.2Nm (22.4kgfcm)
(25) Check the machine reference value when the arm struck against
the mechanical stopper.
!
CAUTION
When the arm moves at high speed and strikes against a mechanical stopper
violently, the machine reference value may change. If this has happened, check
the machine reference value. Also check the mechanical stopper for any dam-
age and the origin position for shift. If the machine reference value is outside
the recommended range, adjust the machine reference. In this case, re-teach-
ing may be required if the origin position has shifted.
(26) Use caution not to apply excessive force to the machine har-
ness, user signal cables and air tubes.
!
CAUTION
A positioning error may occur if excessive force is applied to the machine har-
ness, user signal cables or air tubes. A positioning error may also occur if the
machine harness, user signal cables or air tubes have deteriorated due to im-
proper installation environment.
(27) Caution when turning off the robot controller
!
CAUTION
The XY arm positions might move slightly due to the harness reaction force
when the power to the robot controller is turned off, making it difficult to back up
the correct position data. To avoid this, before turning off the power to the robot
controller, press the emergency stop button and check that the robot arms have
completely stopped.