











Q7130A, Q7230A, Q7330A MODUTROL IV INTERFACE MODULES
63-2235—05 6
(+) and (-) denotes terminals on the controller
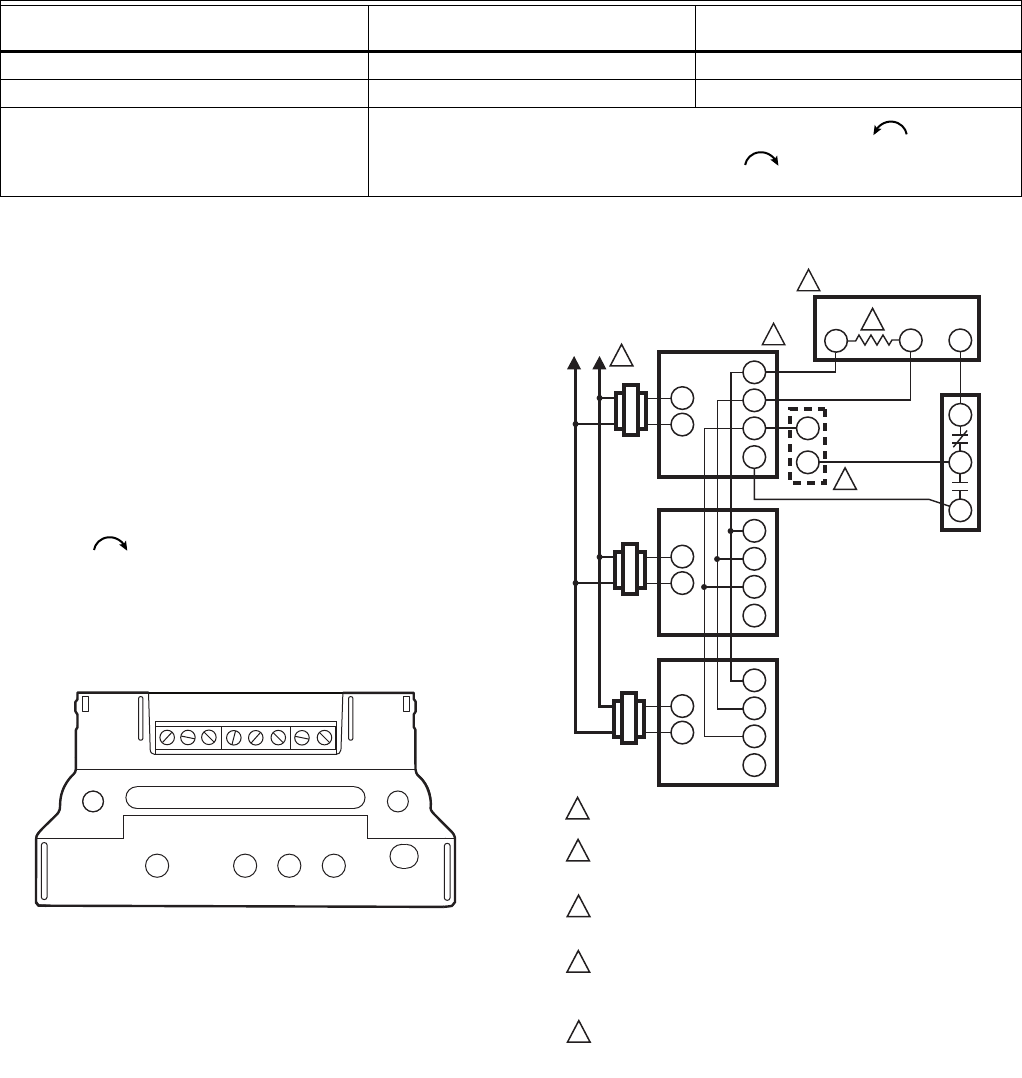
Q7330A Adjustments (Fig. 8 and Table 4)
The Q7330A provides control interface for W936 and W945
controllers. This module consists only of the terminal block
and does not require any adjustments. See Fig. 8 for
terminals.
After the motor stroke is adjusted (if necessary), simply plug
the module onto the motor quick-connect terminals and
secure to the motor. See Fig. 9 for typical system wiring.
To check proper motor operation:
1. Provide power to the motor.
2. Jumper terminals 1 and 2 to drive motor open (clock-
wise as viewed from power end).
3. Jumper terminals 1 and 3 to drive motor closed. Con-
nect field wiring to appropriate screw terminals.
Fig. 8. Q7330A terminals.
Fig. 9. Typical wiring diagram for Q7330A Interface
Module and M91XX Modutrol IV Motor.
Table 3. Q7230/M91XX Checkout Procedure.
Step
Proper Motor Response Switch in
Clockwise Position Switch in Counterclockwise Position
1. Open terminals (+), (-), F Motor closes fully ccw Motor opens fully cw
2. Jumper F to (-) Motor opens fully cw Motor closes fully ccw
3. Remove either T terminal
Spring return motors return to normal spring position (fully ccw for
mechanically normally closed motors, fully cw for mechanically normally
open motors).
M27214
T1
T2
4
3
1
2
4
L1
(HOT)
L2
POWER SUPPLY. PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQURED.
SEE APPROPRIATE SYSTEM CONTROL INSTRUCTIONS
FOR CONNECTIONS TO CENTRAL PROCESSOR.
(LABELED E1 ON W936 OR T1 ON W945).
FIVE PERCENT CARBON RESISTOR. VALUE VARIES WITH
NUMBER OF MOTORS PARALLELED (1000 OHMSÐ2 MOTORS,
820 OHMSÐ3 MOTORS.
AUTHORITY OF MINIMUM POSITION POTENTIOMETER IF USED,
INCREASES WITH NUMBER OF MOTORS PARALLELLED (135
OHMS ON MOTORÐ50 PERCENT STROKE, ON 2 MOTORSÐ
100 PERCENT STROKE, ON 3 MOTORSÐ150 PERCENT STROKE).
USE AUXILIARY END OF M9185 TO REPLACE M945B; M745D
MOTORS TO SPRING RETURM TO THE NORMALLY OPEN
POSITION.
1
M487C
1
5
2
3
4
T1
T2
1
2
3
4
T1
T2
1
2
3
4
T1
T2
1
2
3
4
OPTIONAL
MINIMUM
POSITION
POTENTIOMETER
CHANGEOVER
CONTROLLER
3
ELECTRONIC
MODULATING
DAMPER MOTORS
ELECTRONIC
CENTRAL PROCESSOR
12
3
2
5