



















- App.21 -
Appendixes
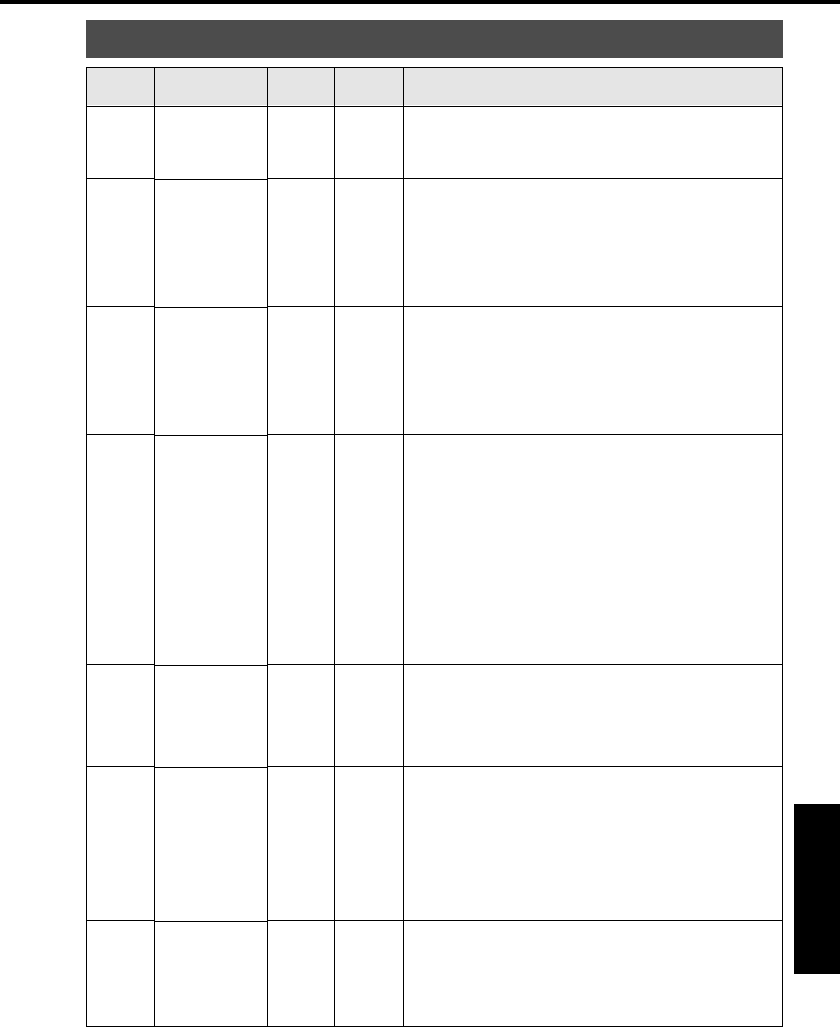
Parameters for Time Constants of Gains and Filters: Related to Real Time Auto Tuning
PrNo. Parameter
Value
Function
•
You can define the response characteristics of position
control. Higher the gain you set, quicker the in-position
time you can obtain.
•
To obtain the overall response of the servo system
together with the above position gain, set this gain as
large as possible.
*
If Pr20 (inertia ratio) has been set correctly, the unit of
values of Pr11 and Pr 19 is Hz.
• Integration element of the velocity loop. The
smaller the setting, the quicker you can reduce
the velocity error to
0.
• The integration is disabled by setting this at
1,000.
• You can set-up the time constant of low-pass
filter(LPF) in 6 stages(0 to 5), which is inserted
after the block , and which converts the encoder
signal to the velocity signal.
• Normally, use the default (4).
•
If set value is smaller, the motor noise increases. But, the time
constant becomes smaller and also the phase lag becomes smaller.
Thus, you can set-up larger. Sudden setting of small value may cause
oscillation to damage machine. Be careful in setting.
• You can set-up the time constant of the primary delay filter that is
inserted to the torque command portion.
• Use this function to suppress the oscillation caused by torsion
resonance.
You can set-up the amount of velocity feed forward at
position control. Position error becomes almost 0 while
the motor runs at a constant speed, by setting this to
100%. The higher the setting you make, the quicker
the response you can obtain with smaller position error,
however, it may cause overshoot.
•
You can set-up the time constant of the primary delay filter that is
inserted to the velocity feed forward portion.
•
Use this function to reduce the over and undershoot of the
speed, chattering of the in-position signal.
10
11
12
13
14
15
16
1st position
loop gain
1st velocity
loop gain
1st speed
detection
filter
Feed forward
filter time
constant
10 ~
2000
[ 50 ]
1 ~
3500
[ 100 ]
1 ~
1000
[ 50 ]
0 ~ 5
[ 4 ]
0 ~
2500
[ 50 ]
0 ~
100
[ 0 ]
0 ~
6400
[ 0 ]
1/s
Hz
*
ms
-----
0.01ms
%
0.01ms
1st velocity
loop integration
time constant
1st torque filter
time constant
Velocity feed
forward
Unit