TOSHIBA
Storage Products for ICT Society
42
Feature Articles
Feature Articles
4. Firmware Technologies
The drive’s firmware consists of the following two function
structures.
(1) Servo control functions
Controls the FDB motor, the VCM for head positioning
and seeking, etc.
(2) Controller firmware functions
Controls the interface that handles commands from
the host as well as the interfaces with the servo con-
trol and cache control functions.
4.1. Servo control functions
The drive achieves an average seek time of 2.7 ms. The
drive accelerates and decelerates the carriage with a
maximum acceleration exceeding 200 G; its maximum
speed reaches 3 m/s. After such rapid acceleration and
deceleration movements, the drive must quickly and stably
follow the target track. Although the width of one track is
only approximately 90 nm, the heads must be positioned
exactly above the center of the tracks. For this reason, we
had to significantly improve the servo feedback control
loop gain. We also optimized the current waveforms
during seeking by taking into consideration the resonance
frequency of the actuator in order to reduce residual
vibrations and carriage acoustic noise (Figure 4).
As part of our efforts to realize the above, we also
increased the sampling frequency of the servo controller,
used faster processors, and optimized servo controller
loop shapes.
Enterprise class HDDs use require consideration of not
only the vibrations inside HDDs but also the influence
of external vibrations. In servers and storage systems,
multiple built-in HDDs as well as the cooling fans
may cause vibrations. To suppress the performance
degradation caused by such vibrations, we used rotational
vibration feed forward (RV-FF) technology to improve
the above-mentioned actuator feedback control. We
also expanded the RV-FF frequency band. These two
improvements contributed to a significant improvement for
the external vibration stress (Figure 5).
We can also reduce power consumption by powering
down circuits individually and reducing the rotation speed
of the disks that are not carrying out read/write operations
after the drive carries out seek movements or while it is in
an idle state. We also optimized the FDB spin-up control,
head loading and unloading controls, and reduced acoustic
noise.
By adopting such technologies, we enabled high
performance, low power consumption, and low acoustic
noise.
4.2. Controller firmware functions
This drive is compatible with the SAS 2.0 industry
standard and enables an interface speed of up to 6
Gbits/s.
The following sections describe the drive’s maintainability
and high reliability as well as its high functionality, high
performance, and low power consumption.
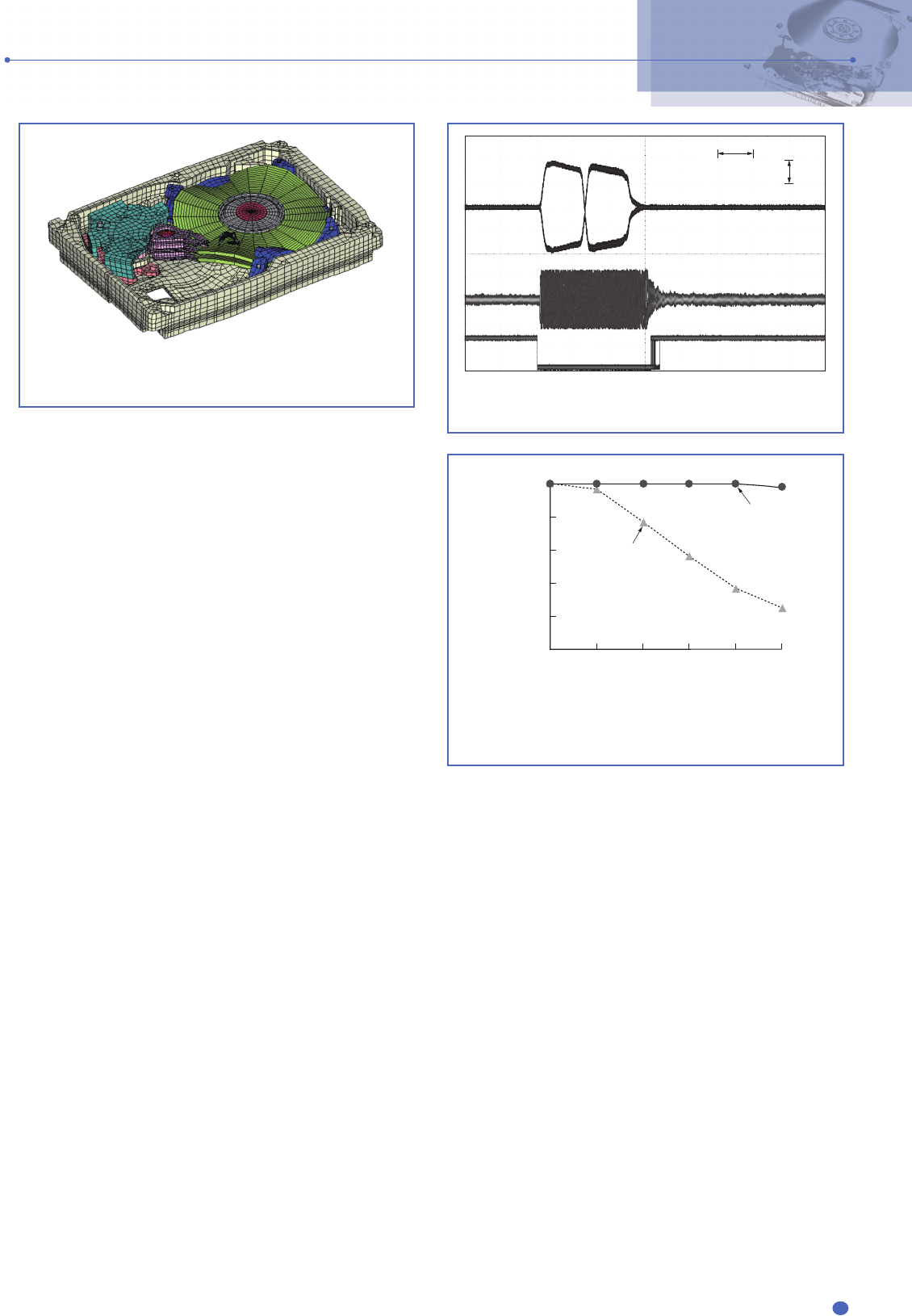
Figure 3 Example of finite element method (FEM) analysis—By conducting large-
scale FEM analysis of the entirety of the HDD’s mechanical components, the shapes and
structures of each component were optimized, enabling high actuator performance.
VCM current
Head position
Seek status
During seek
End of seek movement
1 ms
500 mA
Figure 4 Seek waveform—Alternate seek waveforms with 1/3 of the full stroke
distances; maximum acceleration exceeding 200 G during seek operations.
With RV-FF
Random write performance (%)
Angular Acceleration of the HDD Case (rad/s
2
)
100
80
60
40
20
0
Without RV-FF
0 20 40 60 80 100
Figure 5 Comparison of Performance with/without RV-FF Servo—Without RV-
FF, the performance degradation can be observed at 20 rad/s
2
or more; with RV-FF, no
performance degradation can be observed under 100 rad/s
2
. Anti-vibration performance
is greatly improved.





