














2
SETUP – MK3019GAX (HDD2172)
Caution: Your Hard Disk Drive is a precision device and even a small drop onto any surface can
cause damage. Electronstatic discharge can also damage the drive. You should ground yourself
prior to handling the drive.
Master/Slave Settings
Your Toshiba Hard Disk Drive can be configured as either a "Master" or "Slave" unit. Master
configuration is used for all single drive applications, and master or slave configuration (only one of each
per port) is used for two drive applications. Use the information in the following table before setting drive
as Master or Slave.
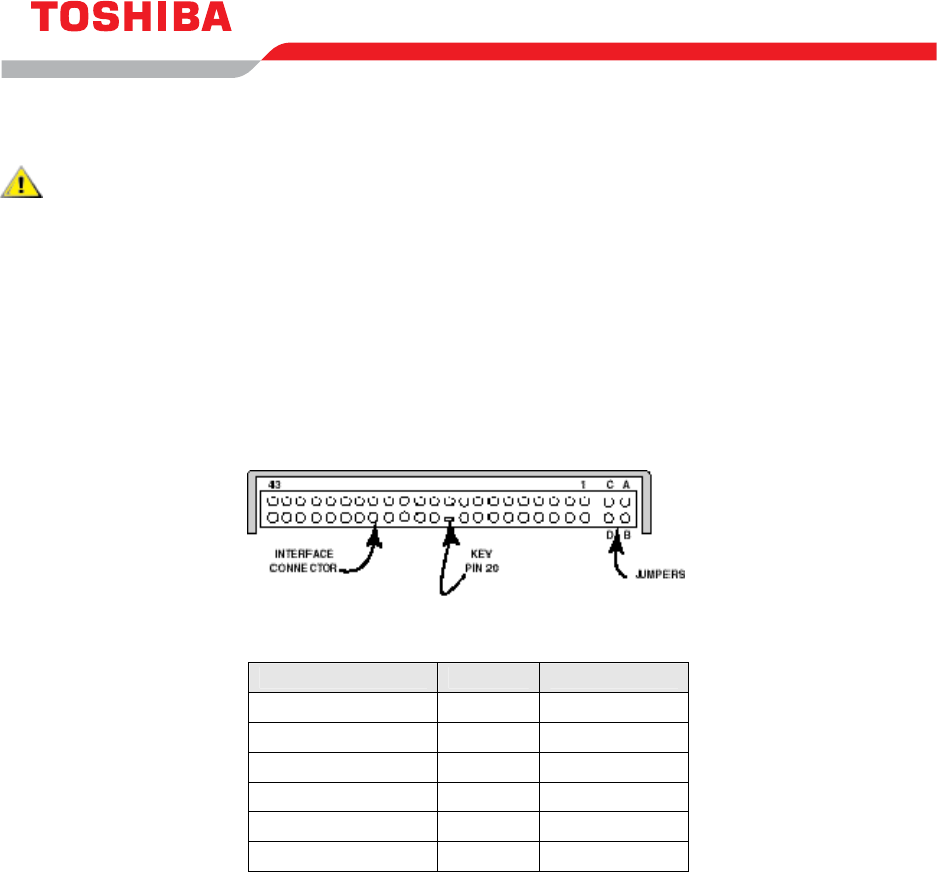
Master configuration is obtained by setting jumpers A, B, C & D open (no jumper present). Slave
configuration is obtained by setting jumpers C-D. When B-D jumper is installed, the drive is configured
as cable select. If pin 28 = Low, the drive is "Master", if pin 28 - High, the drive is "Slave".
Figure 1.HDD Jumper Locations
JUMPER P28 DRIVE
No Jumper - Master Drive
C-D Jumper - Slave Drive
B-D Jumper LOW Master Drive
B-D Jumper HIGH Slave Drive
Prohibit A-B Jumper - -
Prohibit A-C Jumper - -
Installation Notes
The drive should be mounted carefully on the surface of 0.1mm or less flatness to avoid
excessive distortion.
In order to prevent short-circuit under any circumstances, a space of 0.5mm or more should be
kept under the PCB.
Space should be kept around the drive to avoid any contact with other parts, which may occur
due to shock or vibration.
The temperature of the top cover and the base must always be kept under 60C to maintain the
required reliability.
Be sure not to cover the breathing hole to keep the pressure inside the drive at a certain level
Do not apply any force to the top cover, except the screw areas on top cover. Maximum force to
the specified area is 2N.
The drive contains several parts which may be easily damaged by ESD (Electric Static
Discharge). Avoid touching the interface connector pins and the surface of PCB. Be sure to use
ESD proof wrist strap when handling drive.
The four mounting screws should be tightened equally with 0.3N-m (3kgf-cm) torque. The depth
should be 3.0mm minimum and 3.5mm maximum.