



















OM-884 Page 21
SECTION 4 – SEQUENCE OF OPERATION
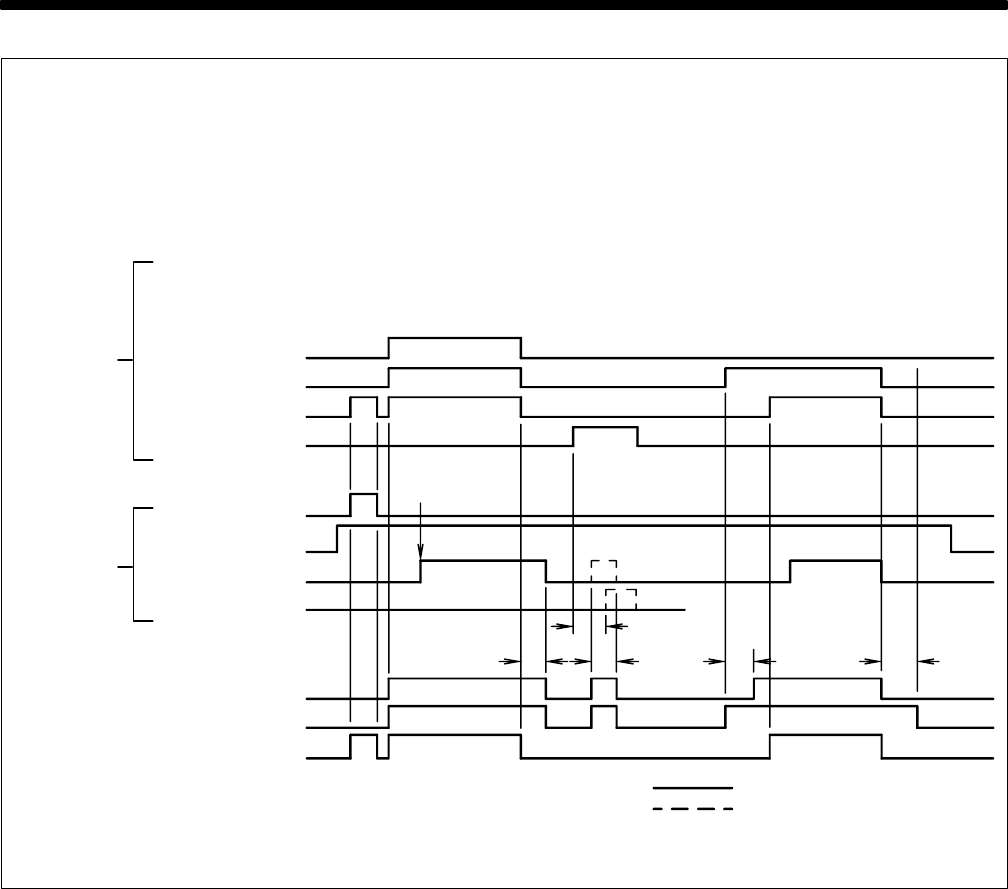
4-1. Input/Output Signals
ST-094 382-B
Robot interface receives input
signals for contactor control, gas
control, jog, welding volts, and wire
speed. It also receives a signal to
initiate a check to see if wire is stuck
to workpiece at end of a weld.
Robot interface sends output sig-
nals to robot control unit for current
sense, wire stuck, and weld stand-
by.
Wire Feed Speed 0-10V = 0-1000 IPM
Output Volts 0-10V = 0-50V
Peak Amps 0-10V = 0-500 Amps Output
Gas Control
Jog Fwd.
Contactor Control
Wire Stuck Check
Jog
Power On, Standby
Current Detect
Wire Stuck
Output Voltage
Shielding Gas
Wire Feed
Wire Contact
To Workpiece
Burnback
Time
Normal
Abnormal
Preflow
Time
Postflow
Time
Computer
Interface
To Robot
Control Unit
Robot Control
Unit To
Computer
Interface
60 MS
50 MS
≈
≈