



















Full-voltage AC magnetic multi-speed
controllers are designed to control recon-
nectable squirrel-cage induction motors
for operation at two, three or four differ-
ent constant speeds depending on the
construction of the motor. These con-
trollers are available in combination and
non-combination types.
The speed of an induction motor is a
function of the supply frequency and the
number of poles of the motor winding. To
obtain different speeds with a fixed sup-
ply frequency, the number of magnetic
poles of the motor must be changed.
Characteristics at any speed are similar to
those of a single-speed motor. There are
two basic methods for providing multiple
combinations:
½ Separate-Winding Motors have a
separate winding for each speed.
This motor construction is relatively
simple, and a wide variety of speeds
can be selected. Separate winding
motors with delta connected motor
windings require one corner to be
opened on each unused winding.
½ Consequent-Pole Motors have a
single winding for two speeds. Extra
winding taps are brought out for
reconnection for different numbers of
stator poles. The controller is more
complicated, and speed range is lim-
ited to a 2-to-1 ratio.
Two-speed consequent-pole motors have
one reconnectable winding. Three-speed
motors have two windings, one of which
is reconnectable. Four-speed motors
have two reconnectable windings. Each
unused delta connected winding must
have one corner open.
Torque Characteristics
Multi-speed motors are divided into three
application groups:
½ Constant Torque: HP output varies
directly with speed, while torque
remains constant. A constant torque
motor rated 100 HP at 1200 rpm
delivers 50 HP at 600 rpm. This type
is applicable to conveyors, mills,
dough mixers, reciprocating pumps,
and other similar loads.
½ Variable Torque: HP varies as square
of speed, while torque varies directly
with speed. A variable-torque motor
rated 100 HP at 1200 rpm delivers 25
HP at 600 rpm. This type is applicable
to drives having fan or centrifugal
pump characteristics.
½ Constant Horsepower: Motor deliv-
ers rated HP at all full-load speeds,
while torque varies inversely as
speed. This type is applicable to
cutting tools, lathes, spindles, etc.
Starter Types (NEMA Sizes 0–7)
Single Winding (Consequent Pole)
Variable Torque
Single Winding (Consequent Pole)
Constant Torque
Single Winding (Consequent Pole)
Constant Horsepower
Two Winding (Separate Winding)
Variable Torque
Two Winding (Separate Winding)
Constant Torque
Two Winding (Separate Winding)
Constant Horsepower
Note — Reversing types, reduced
voltage types, and three or four speeds
are also available.
Enclosures
Type 1: General Purpose
Type 3R: Outdoor Raintight
Type 12: Dusttight — Industrial Use
Type 4: Watertight Stainless Steel or
Watertight Painted Sheet Steel
305CSI Section 16160
Siemens Electrical Products and Systems
Specification Guide
AC Controls
15
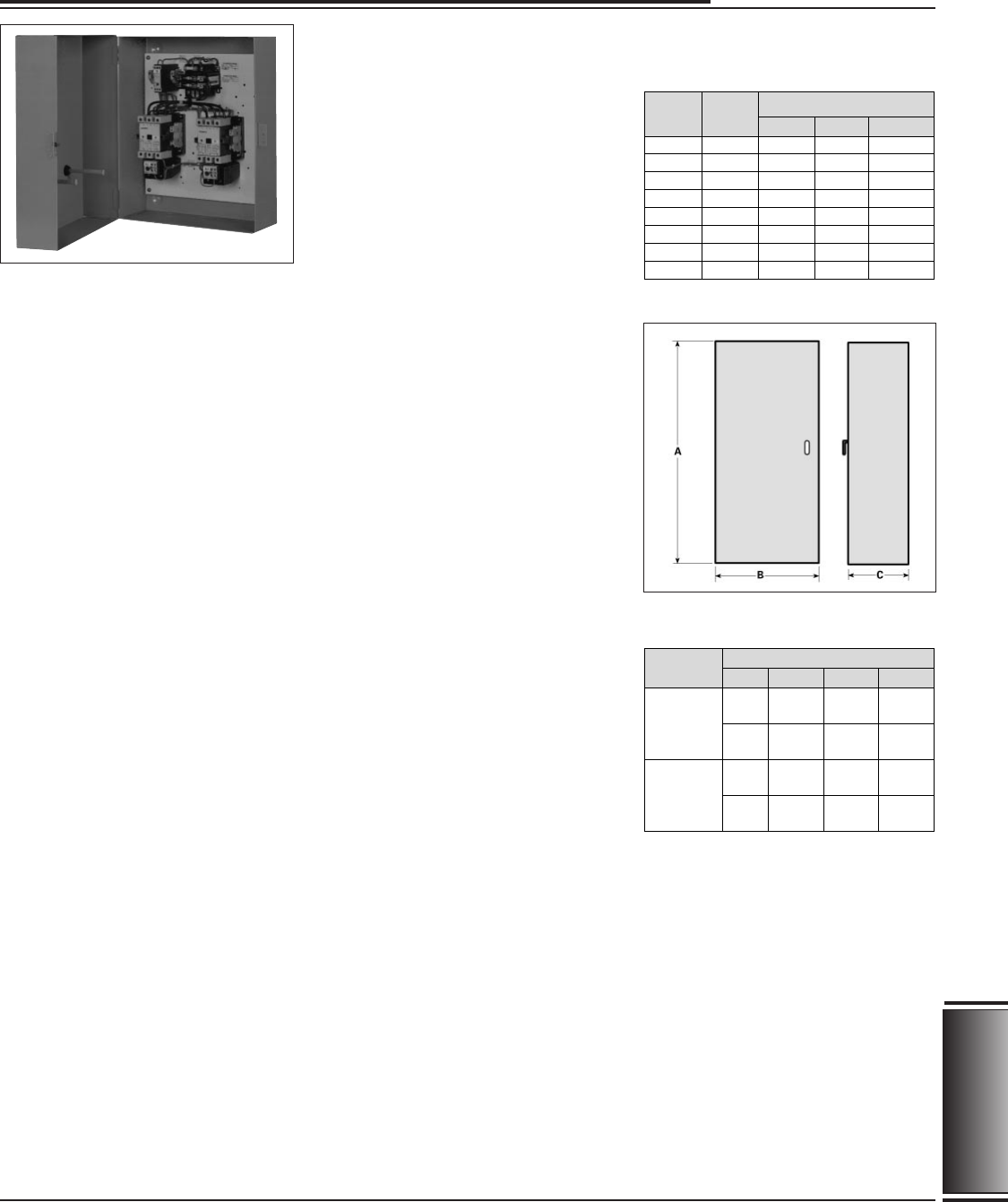
General / Dimensions
AC Controls
Multi-Speed Starters (NEMA Sizes 0–4)
Dimensions in Inches (mm)
Table 15.34
Multi-Speed Starter
Combination
Size A B C
NEMA 1
General
Purpose
Enclosures
NEMA 12
Industrial
Use
Enclosures
0–1
3
⁄
4
2–3
0–1
3
⁄
4
2–3
16.00
(406)
19.00
(483)
16.00
(406)
34.25
(870)
25.75
(654)
31.50
(800)
28.50
(724)
34.25
(870)
7.63
(194)
7.63
(194)
7.69
(195)
7.69
(195)
Maximum Horsepower
Table 15.33
Starter
3-Phase Multi-Speed
460/575V230V200V
NEMA
Starter
Size
Half
Size
0
1
2
3
4
1
3
⁄
4
*
2
1
⁄
2
*
3
1
⁄
2
*
3
7.5
10
10
15
25
30
40
3
7.5
10
15
20
30
40
50
5
10
15
25
30
50
75
100
Ratings
Dimensions