



















20
Other Information
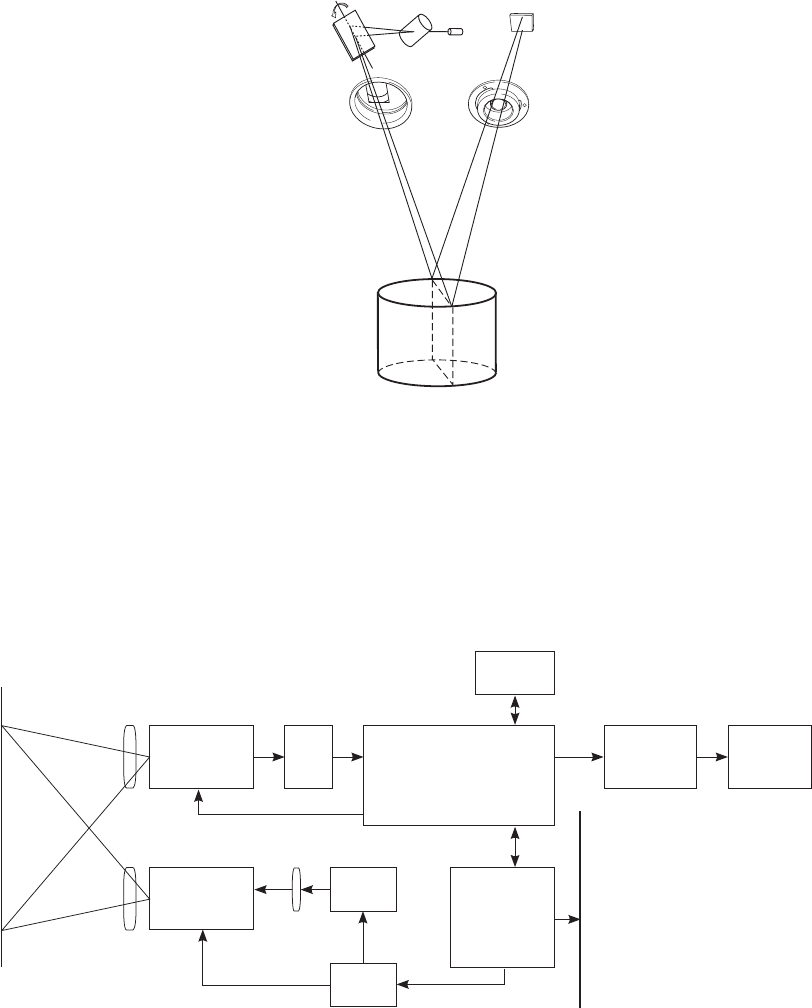
n Measuring Principles
<Basic Principle>
TheRANGE7/5usesthelightsectioningmethodtoemitahorizontalstripelightthroughacylindricallenstotheobject.
ThereectedlightfromtheobjectisreceivedbytheCMOSsensor,andthenconvertedbytriangulationintodistance
information.ThisprocessisrepeatedbyscanningthestripelightverticallyontheobjectsurfaceusingaGalvanomirror,to
obtaina3Dimagedataoftheobject.
<High-Speed Image Processing Circuit>
ThestripelightisscannedontheCMOSimageplaneatonehorizontallineperframe,andtheCMOSisdrivensothatthe
blockreadoutstartpositionisshiftedonelineperframe.Approximately1400framesareacquired.
• Framerate:600frames/sec.
• Blockreadout:350lines
TheoutputsignalfromtheCMOSsensoristhenconvertedintoadigitalsignal,whichisthensubjectedtodigitalsignal
processing.TheprocesseddataisnallytransferredtothecomputerviatheUSBinterface.
CMOSSensor
Galvano
Scanner
Lazer
Diodo
CPU
Driver
CPUDataBus
A/D
FPGA
Frame
Memory
USBDriver USB
<Time center of gravity and Space center of gravity>
Withthisinstrument,3DimagesareobtainedbycalculatingthetimecenterofgravityofeachpixeloftheCMOSsensor.With
thismethod,comparedtothespacecenterofgravity,useofthetimecenterofgravityreducestheinuenceofsensitivity
variationsoftheCMOSsensorpixelsandvariationsinobjectbrightness.
Frame interline
Transfer CCD
Galvano
Scanner
CPU
A/D
Clock Generator
FIFO
Host I/F
DSP
Frame
Memory
Laser
Diode
Driver
CPU Data Bus
Galvano mirror
Emitting lens
Laser beam
Light-receiving lens
Object
CMOS sensor