


















Seagate Enterprise Capacity 2.5 HDD v3 SAS Product Manual, Rev. D 35
9.0 Defect and error management
Seagate continues to use innovative technologies to manage defects and errors. These technologies are designed to increase data
integrity, perform drive self-maintenance, and validate proper drive operation.
SCSI defect and error management involves drive internal defect/error management and SAS system error considerations (errors in
communications between the initiator and the drive). In addition, Seagate provides the following technologies used to increase data
integrity and drive reliability:
• Background Media Scan (see Section 9.4)
• Deferred Auto-Reallocation (see Section 9.5)
• Idle Read After Write (see Section 9.6)
The read error rates and specified storage capacities are not dependent on host (initiator) defect management routines.
9.1 Drive internal defects/errors
During the initial drive format operation at the factory, media defects are identified, tagged as being unusable, and their locations recorded
on the drive primary defects list (referred to as the “P’ list and also as the ETF defect list). At factory format time, these known defects are
also reallocated, that is, reassigned to a new place on the medium and the location listed in the defects reallocation table. The “P” list is not
altered after factory formatting. Locations of defects found and reallocated during error recovery procedures after drive shipment are listed
in the “G” list (defects growth list). The “P” and “G” lists may be referenced by the initiator using the Read Defect Data command.
Details of the SCSI commands supported by the drive are described in the SAS Interface Manual. Also, more information on the drive Error
Recovery philosophy is presented in the SAS Interface Manual.
9.2 Drive error recovery procedures
When an error occurs during drive operation, the drive, if programmed to do so, performs error recovery procedures to attempt to recover
the data. The error recovery procedures used depend on the options previously set in the Error Recovery Parameters mode page. Error
recovery and defect management may involve using several SCSI commands described in the SCSI Interface Product Manual, 75789509.
The drive implements selectable error recovery time limits required in video applications.
The error recovery scheme supported by the drive provides a way to control the total error recovery time for the entire command in addition
to controlling the recovery level for a single LBA. The total amount of time spent in error recovery for a command can be limited using the
Recovery Time Limit bytes in the Error Recovery mode page. The total amount of time spent in error recovery for a single LBA can be
limited using the Read Retry Count or Write Retry Count bytes in the Error Recovery mode page.
The drive firmware error recovery algorithms consist of 20 levels for read recoveries and six levels for write. Each level may consist of
multiple steps, where a step is defined as a recovery function involving a single re-read or re-write attempt. The maximum level used by the
drive in LBA recovery is determined by the read and write retry counts.
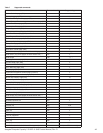
Table 4 equates the read and write retry count with the maximum possible recovery time for read and write recovery of individual LBAs.
The times given do not include time taken to perform reallocations. Reallocations are performed when the ARRE (Auto Read Reallocation)
bit or AWRE (Auto Write Reallocation) bit is one, the RC (Read Continuous) bit is zero, and the recovery time limit for the command has
not yet been met. Time needed to perform reallocation is not counted against the recovery time limit.
When the RC bit is one, reallocations are disabled even if the ARRE or AWRE bits are one. The drive will still perform data recovery
actions within the limits defined by the Read Retry Count, Write Retry Count, and Recovery Time Limit parameters. However, the drive
does not report any unrecovered errors.