















9
10
RMS Reduction Current (Amps)=(.707)(.002)xR(Adjust)xR(Reduction)
R(Adjust)+R(Reduction)
REDUCING OUTPUT CURRENT STEP MOTOR CONFIGURATIONS
Reducing the output current in the MDM60001 can be accomplished by connecting an currents. Shown below are different lead configurations and the procedures to determine
external resistor (1/8 watt or higher) between pins 1 and 2 of connector P2 and ocurrs their output current.
automatically 1 second after the last positive going edge of the step clock input. See Figure
1 for TYPICAL HOOK-UP.
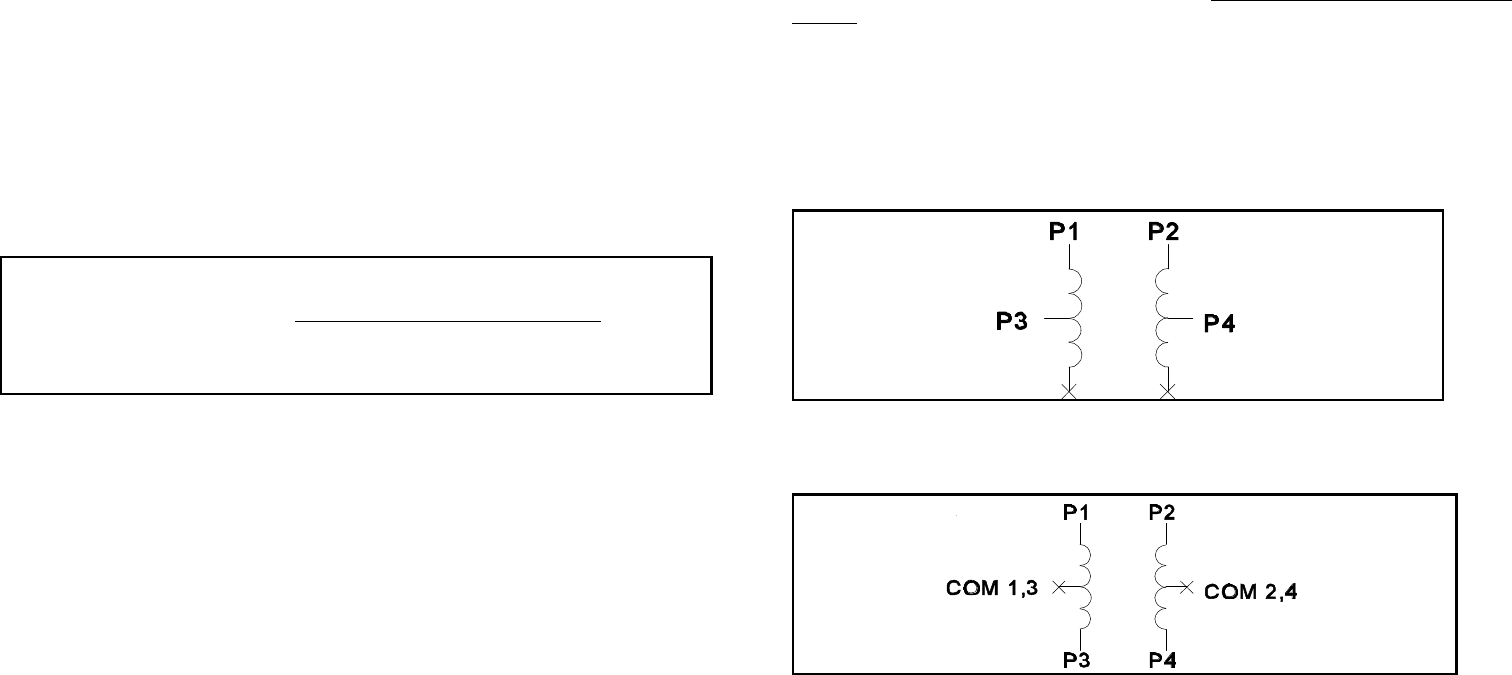
The amount of current per Phase in the reduction mode is related to the value of the current When configuring a 6 lead motor in a half-coil configuration (connected from one end of
adjustment resistor and the current reduction resistor. When the current reduction circuit the coil to the center tap) use the specified per Phase (or unipolar) current rating to
is activated, the current reduction resistor is paralleled with the current adjustment resistor. determine the current adjustment resistor value. This configuration will provide more
This lowers the total resistance value, and thus lowers the per Phase output current. The torque at higher speeds. Use this to determine the current adjustment resistor value.
relationship between the output current and the resistor's value is as follows:
NOTE: When connecting the current reduction resistor between pins 1 and 2 of connector
P2 , the length of the leads should be as short as possible to help minimize noise coupled
into the driver.
MOTOR SELECTION
The MDM60001 is a Bipolar driver working equally well with both Bipolar and Unipolar
Motor Configurations,( i.e. 8 and 4 lead motors and 6 lead center tapped motors).
Motors with low current ratings and high inductance will perform better at low speeds,
providing higher low-end torque. Motors with high current ratings and low inductance will
perform better at higher speeds, providing higher high-end torque.
Since the MDM60001 is a constant current source, it is not necessary to use a motor that
is rated at the same voltage as the supply voltage. What is important is that the
MDM60001 is set to the appropriate current level based on the motor being used.
Higher voltages will cause the current to flow faster through the motor coils. This in turn
means higher step rates can be achieved. Care should be taken not to exceed the maximum
voltage of the driver.
Step motors can be configured as 4, 6, or 8 leads. Each configuration requires different
6 Lead Motors
When configuring the motor in a series configuration (connected from end to end with the
center tap floating) multiply the per Phase (or unipolar) current rating by 0.7.Use this result
to determine the current adjustment resistor value.
WARNING! Step motors will run hot even when configured correctly, damage may occur
to the motor if a higher than specified current is used. Most specified motor currents are
maximum values. Care should be taken to not exceed these ratings.