



















Setup & Operation 1. Safety
6 G10 / G20 Rev.2
1.4 Emergency Stop
If the Manipulator moves abnormally during operation, immediately press the Emergency
Stop switch. Stops the power supply to the motor, and the arm stops in the shortest
distance with the dynamic brake and mechanical brake.
However, avoid pressing the Emergency Stop switch unnecessarily while the Manipulator
is running normally. Otherwise, the Manipulator may hit the peripheral equipment since
the operating trajectory while the robot system stops is different from that in normal
operation.
To place the system in emergency mode during normal operation, press the Emergency
Stop switch when the Manipulator is not moving.
Refer to the Controller manual for instructions on how to wire the Emergency Stop switch
circuit.
Free running distance in emergency
The operating Manipulator cannot stop immediately after the Emergency Stop switch is
pressed.
The free running time/angle/distance of the Manipulator are shown below. However,
remember that the values vary depending on following conditions.
Weight of the end effector Weight of work piece Operating pose
Weight Speed Accel etc.
Conditions for Measurement
G10 G20
Accel Setting 100 100
Speed Setting 100 100
Load [kg] 10 20
Weight Setting 10 20
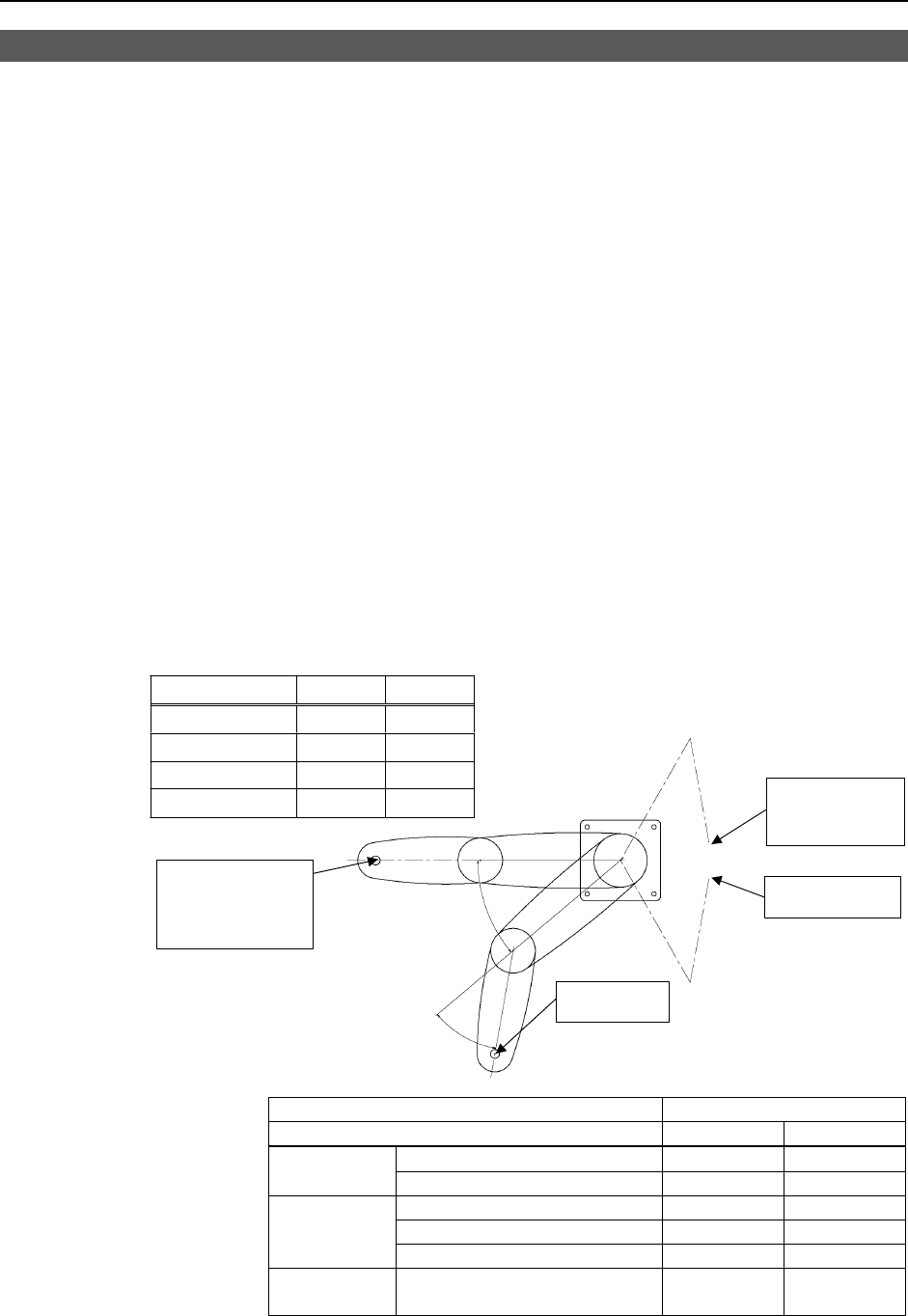
Joint #1
Start point of
operation
Target point
Stop point
Joint #2
Point where the
emergency stop
signal is input
Controller RC180
Manipulator G10-85*** G20-A0***
Joint #1 + Joint #2 [sec.] 0.7 1.3 Free running
time
Joint #3 [sec.] 0.5 0.8
Joint #1 [deg.] 70 110
Joint #2 [deg.] 50 50
Free running
angle
Joint #1 + Joint #2 [deg.] 120 160
Free running
distance
Joint #3 G10/G20-**1**[mm]
G10/G20-**4**
80
160
90
170
Contact us for details of G10-65*** or G20-85***.