



















Setup & Operation 2. Specifications
24
G10 / G20 Rev.2
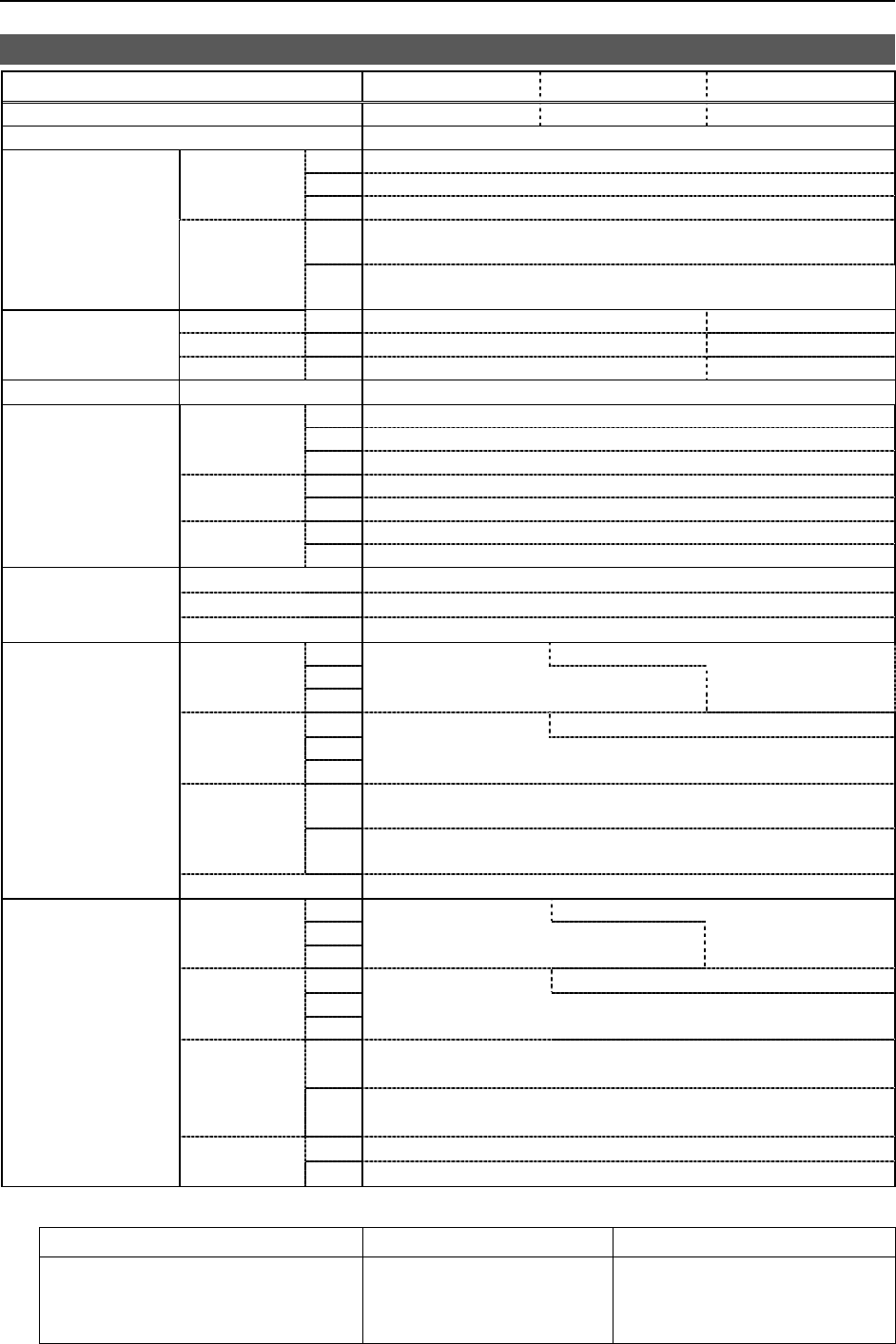
2.4 Specifications
Item G10/G20-**** G10/G20-****R G10/G20-*****W
Mount method Table Top Ceiling Wall
Environment
Cleanroom-model *1 /
Protected-model *2
65 650 mm (G10 only)
85 850 mm
Arm #1, #2
A0 1000 mm (G20 only)
1
180 mm : G10/G20-**1S*
150 mm : G10/G20-**1C*
Arm length
Arm #3
4
420 mm : G10/G20-**4S*
390 mm : G10/G20-**4C*
G10 65 46 kg : 102 lb 51 kg : 113 lb
G10/G20 85 48 kg : 106 lb 53 kg : 117 lb
Weight
(not include the weight
of cables)
G20 A0 50 kg : 111 lb 55 kg : 122 lb
Driving method All joints
AC servo motor
65 Contact us for the value.
85 11000 mm/s
Joints
#1, #2
A0 11500mm/sec
1 1100 mm/s
Joint #3
4 2350 mm/s
G10 2400 deg/s
Max.
operating
speed *3
Joint #4
G20 1600 deg/s
Joints #1, #2
±0.025 mm
Joint #3
±0.01 mm
Repeatability
Joint #4
±0.005 deg
65
85
Joint #1
A0
±152 deg
±107 deg
65
±130 deg
85
Joint #2
A0
±152.5 deg *a
1
180 mm : G10/G20-**1S*
150 mm : G10/G20-**1C*
Joint #3
4
420 mm : G10/G20-**4S*
390 mm : G10/G20-**4C*
Max.
motion range
Joint #4
±360 deg
65
85
Joint #1
A0
-1805881 to +7048761
-495161 to +5738041
65
±2366578
85
Joint #2
A0
±2776178 *a
1
-1946420 : G10/G20-**1S*
-1622016 : G10/G20-**1C*
Joint #3
4
-2270823 : G10/G20-**4S*
-2108621 : G10/G20-**4C*
G10
±1951517
Max.
pulse range
(pulse)
Joint #4
G20
±2752512
*a : The Joint #2 values for the following manipulators
Max. motion range Max. pulse range
G10/G20-85C (Z: −360 to −390 only)
G10/G20-85CW
G10/G20-85CR
±151 deg
±
2748871