



















PID ON/OFF and PID Clear
The PID loop function is useful for controlling motor speed to achieve constant flow,
pressure, temperature, etc. in many process applications. The PID Disable function
temporarily suspends PID loop execution via an intelligent input terminal. It overrides
the parameter A071 (PID Enable) to stop PID execution and return to normal motor
frequency output characteristics. The use of PID Disable on an intelligent input
terminal is optional. Of course, any use of the PID loop control requires setting PID
Enable function A071=01.
The PID Clear function forces the PID loop integrator sum = 0. So, when you turn ON
an intelligent input configured as [PIDC], the integrator sum is reset to zero. This is
useful when switching from manual control to PID loop control and the motor is
stopped.
C
AUTION: Be careful not to turn PID Clear ON and reset the integrator sum when the
inverter is in Run Mode (output to motor is ON). Otherwise, this could cause the motor
to decelerate rapidly, resulting in a trip.
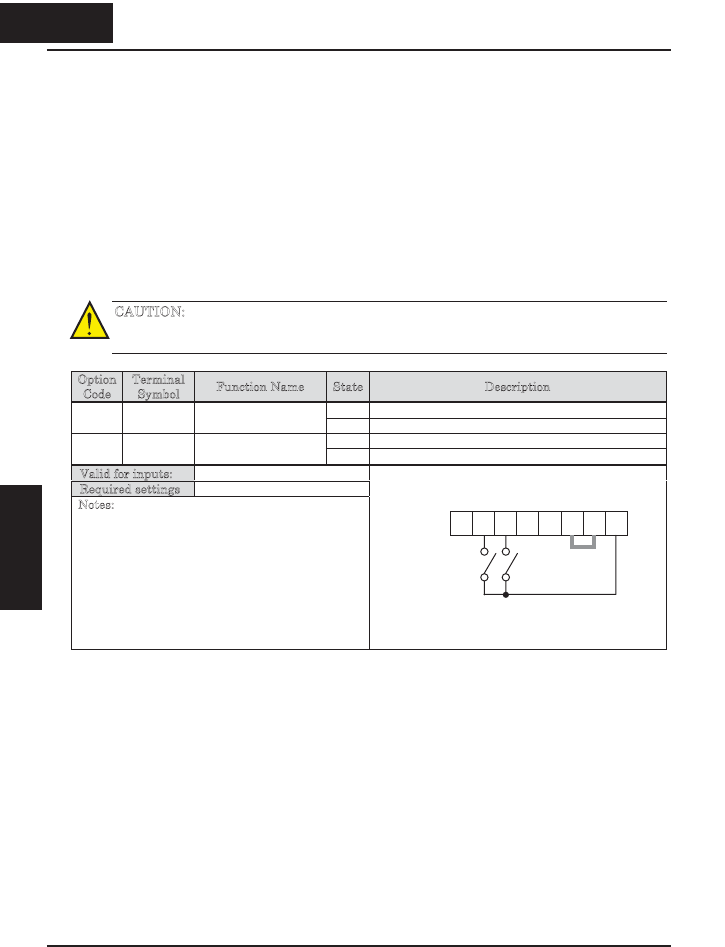
Option
Code
Terminal
Symbol
Function Name State Description
ON Disables PID loop execution23 PID PID Disable
OFF Allows PID loop execution
ON Force the value of the integrator to zero24 PIDC PID Clear
OFF No change in PID loop execution
Valid for inputs: C001~C005
Required settings A071
Notes:
x The use of [PID] and [PIDC] terminals are
optional. Use A071=01 if you want PID loop
control enabled all the time.
x Do not enable/disable PID control while the
motor is running (inverter is in Run Mode).
x Do not turn ON the [PIDC] input while the
motor is running (inverter is in Run Mode).
Example (default input configuration shown—see
page 3–49):
See I/O specs on page 4–6.
5 4 3 2 1 L
PCS
P24
PIDC
PID
426
Operations and
Monitoring
4 26
Operations and
Monitoring