



















Appendix A – Tuning
43
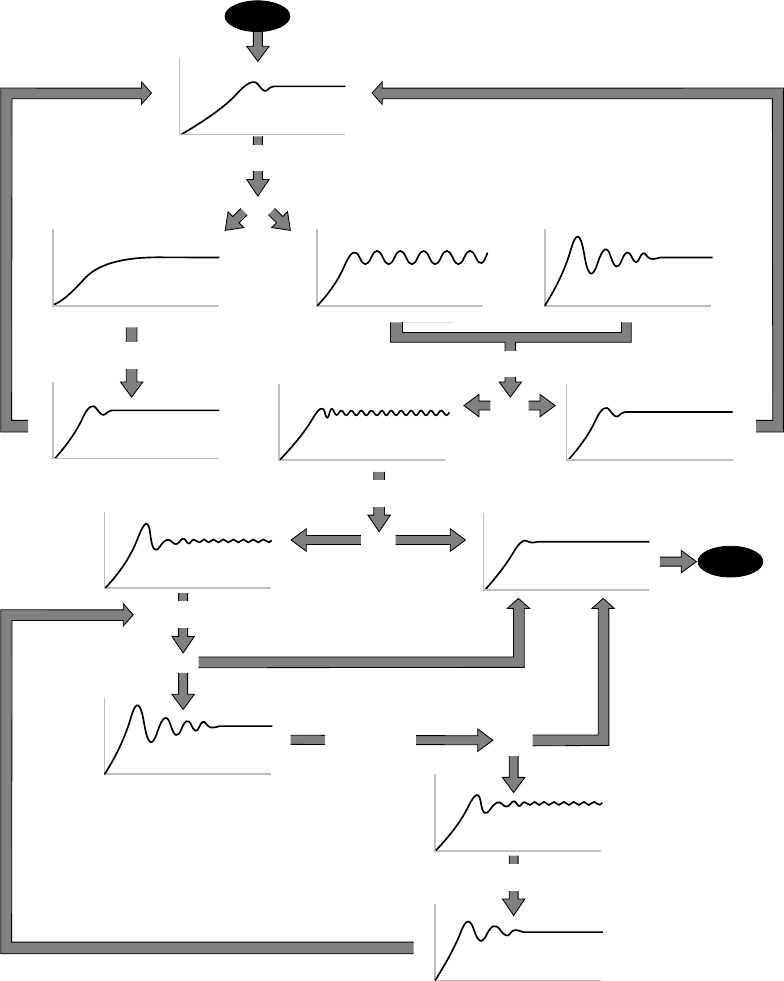
Tuning Process Flow Diagram
(using proportional and velocity gains)
OR
Increase SGP
UNTIL
OR
Decrease SGV
UNTIL
Increase SGV
UNTIL
OR
OR
Decrease SGV
UNTIL
OR
Decrease SGP
UNTIL
OR
Decrease SGV
UNTIL
Increase SGV
UNTIL
START
STOP
Step 6
Use the Velocity Feedforward Gain (SGVF) to
reduce position error at constant speed.
a. Execute a continuous (MC1 command) move, setting
the acceleration, deceleration and velocity values
appropriate to your application. Set the SGVF value to
be the product of SGP * SGV (if SGV = zero, set SGVF
equal to SGP).
b. Check the position error at constant velocity by
issuing the TPER command.
c. Increase SGVF to reduce the position error (repeat steps
a and b as necessary).
Step 7
Use the Acceleration Feedforward Gain (SGAF)
to reduce position error during acceleration.
a. Execute a continuous (MC1 command) move, setting
the acceleration, deceleration and velocity values
appropriate to your application. Set SGAF to 0.01
(SGAF¯.¯1).
b. Check the position error during acceleration by issuing
the TPER command.
c. Increase SGAF to reduce the position error (repeat steps
a and b as necessary).