



















STE 58764
- -
2-10
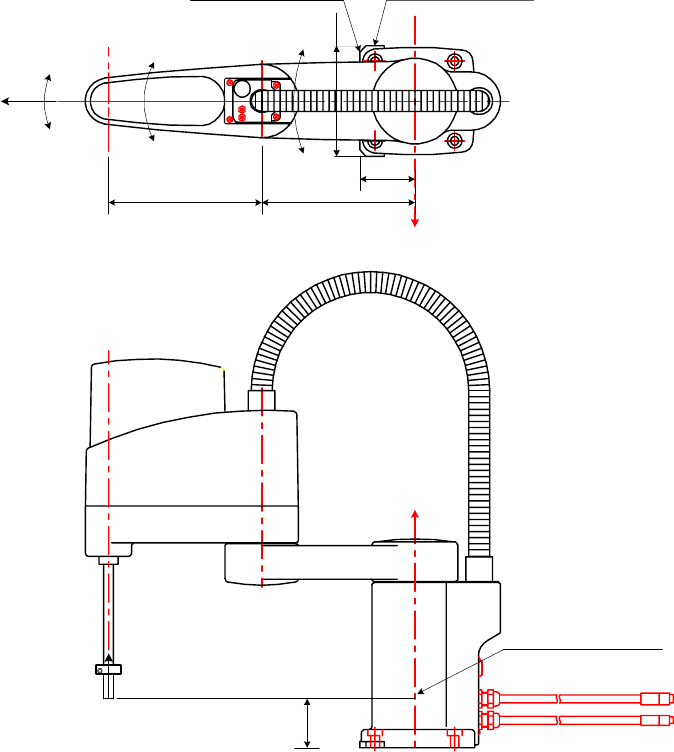
2.2.3 Coordinate System
The robot's joint angle zero point (0° or 0mm position) has been calibrated before
shipment in respect to the base reference planes. The base coordinate system will be
determined according to this calibration. Figs. 2.11 to 2.15 show the base coordinate
system and the zero positions of each axis joint angle.
Fig. 2.11 SR-504HSP base coordinate system and joint angle zero point
250 250
90
180
Axis 1
Axis 2
Axis 4
0° 0°
0°
(+)
(+)
(+)
(-)
(-)
(-)
Reference plane
Axis 3
(+)
0mm
◎
Origin of base
coordinate system
100
X
B
Z
B
Y
B
Reference plane