



















STE 58764
- -
2-11
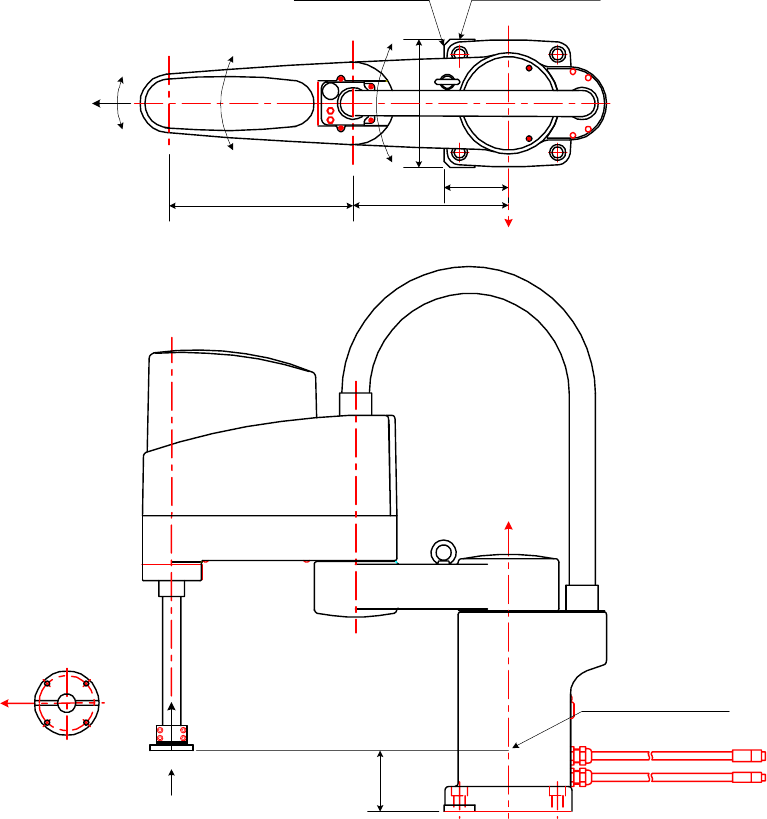
Fig. 2.12 SR-554HSP base coordinate system and joint angle zero point
105
210
250
300
Axis 1
Axis 2
Axis 4
(+)
(+)
(+)
(-)
(-)
(-)
Reference plane
View A
View A
Axis 3
(+)
Origin of base
coordinate system
◎
100
0mm
X
B
X
B
Y
B
Z
B
Reference plane