



















Manual Stair Robot SR1750 HE
Publication: 29-07-04
AATA INTERNATIONAL B.V.
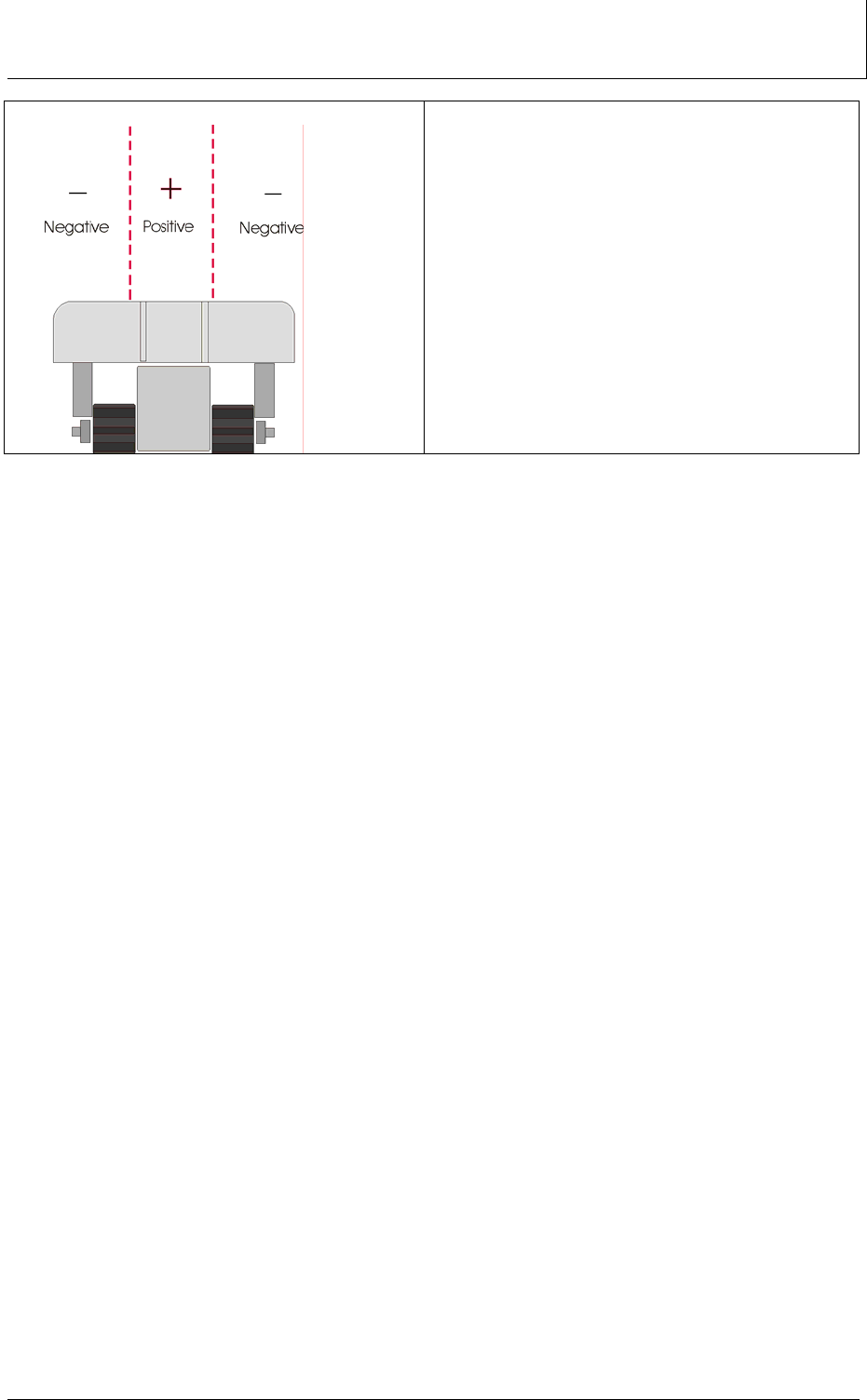
• The centre of gravity of the load should
be within the positive area between the
tracks.
5.2.2. Loading procedure
• Start the procedure by securing the area for loading. Move the dolly with the stair
robot into the desired position for loading.
• Always unroll extension power cable and connect with the robot before connecting
to mains
• Reverse the Robot of the dolly, fit the loading-ramp into position at the front of the
robot
• Slot the winch into the lifting platform at the rear of the stairrobot
• Pull the winch-hawser out and connect it with the load. The load can now be
winched into position on the stairrobot, one man operating the winch and one man
guiding the load of the ramp onto the platform. While operating the winch the
lifting platform will rise until the platform has reached the same gradient as the
loading-ramp
• Connect the load secure to the lifting platform. Note: never fit any straps to the
chassis-bracket
• If the load is secured to the stairrobot the winch and loading ramp can be
removed
• Always remove the winch from the stairrobot before ascending the stairway
because it ads length to the dimensions of the stairrobot
• Turn the descent-adjuster maximum clockwise
• Lift the platform +/- 10 cm by pushing the up-button
• Push the down-button to lower the platform and turn the descent adjuster counter
clockwise until the platform starts to descent. Lower the platform
• The stairrobot can now be driven back on the dolly; use the up-button to keep the
‘platform level’ in horizontal position
Page 16 of 28