


















Manual Stair Robot SR1750 HE
Publication: 29-07-04
AATA INTERNATIONAL B.V.
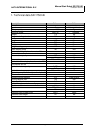
2. 6. Descent adjuster
•
The descent adjuster is located at the rear end of
the machine and is used to adjust the descent of
the lifting platform depending on the weight of the
load.
•
Turn maximum clockwise for speed : 0
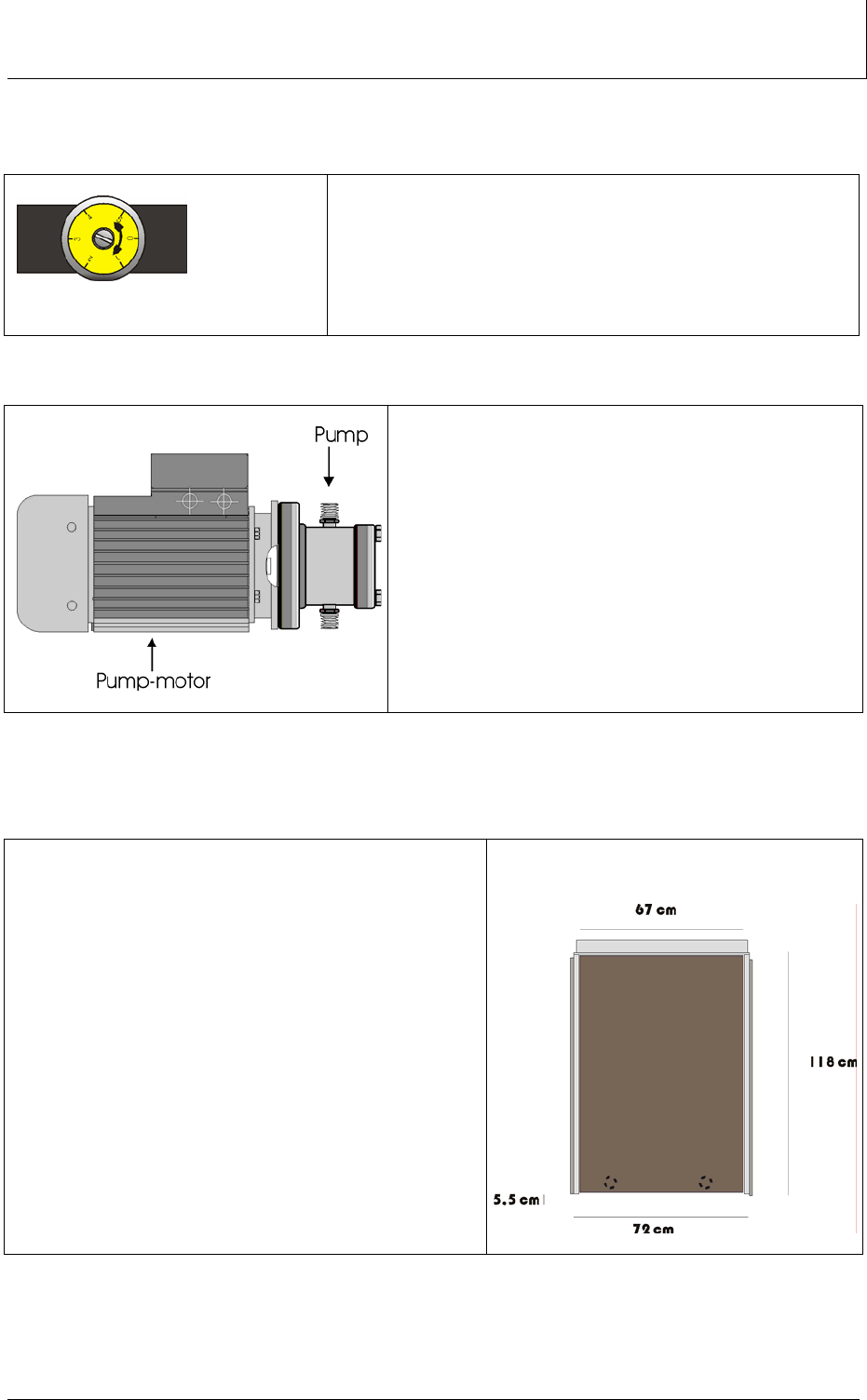
2.7. Hydraulic motor and pump
•
The hydraulic-motor is placed on the drive
motor with the pump built directly onto the
motor
3. Ancillary equipment
3.1. Loading ramp
• The loading ramp is designed to fit neatly
into the stairrobots lifting platform. It
provides a safe ridged platform to transport
the load from the floor-surface to the load-
position on the robot.
Page 9 of 28