



















Manual Stair Robot SR1750 HE
Publication: 29-07-04
AATA INTERNATIONAL B.V.
5.3. Ascending
Load level
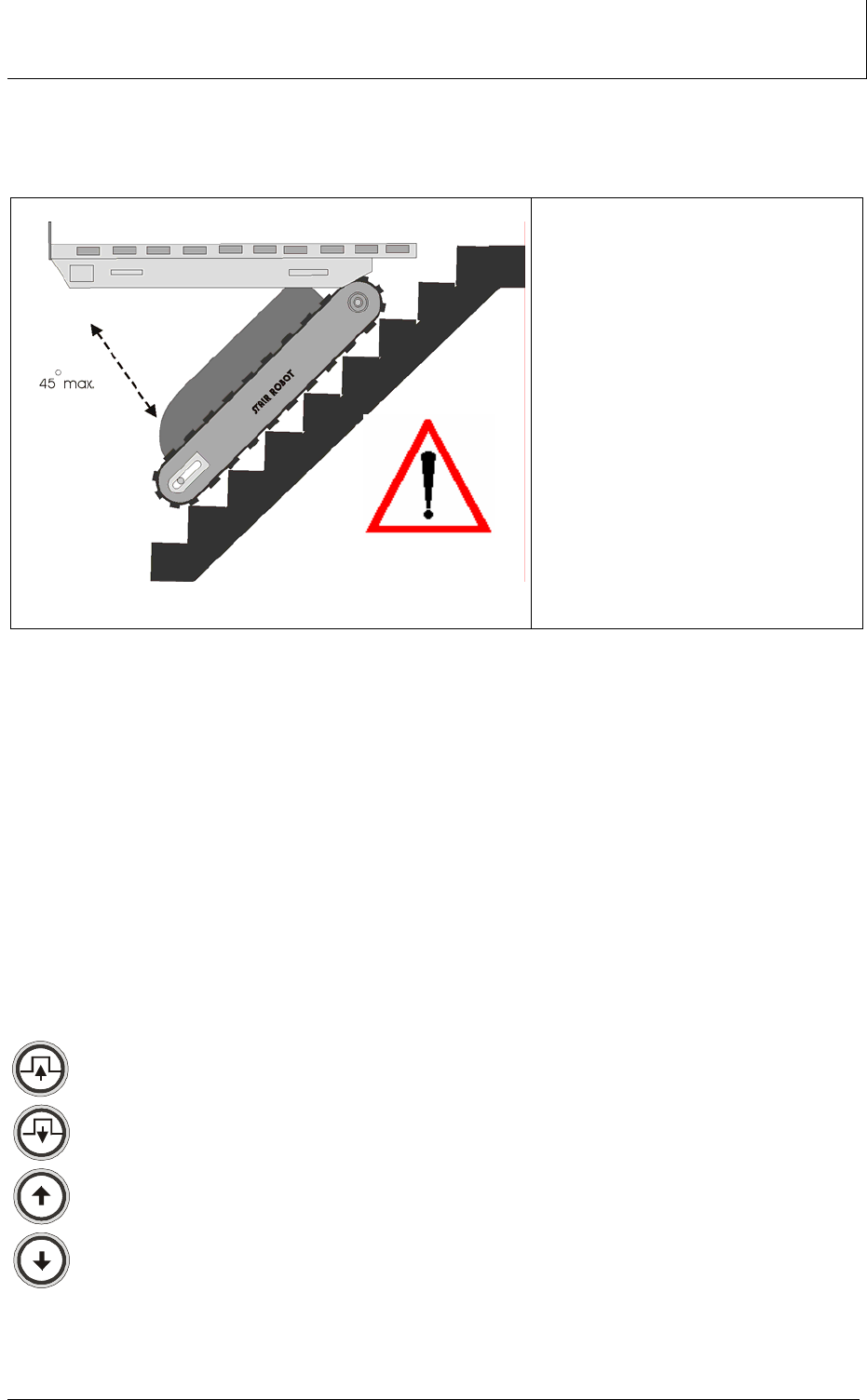
• Ideal load level is obtained
by adjusting the platform to
the gradient of the stairs or
dolly
• The objective is to maintain
a horizontal level of the
platform during operation.
• Note: do not lower the platform
over its balance point, the Stair
robot will get instable during
the process of climbing or
descending a staircase. This
can cause the robot to fall
down the stairs resulting in
serious damage and injuries.
• Move the loaded stairrobot on the dolly with the forward end towards the bottom of
the stairs
• Fit the lead on ramp between the dolly and second or third step on the stairs.
• Secure a load support strap (6 m) to the reverse end of the stairrobot. Place the strap
across the forward end of the load to be held by one of the operators.
• Both operators should move on to the stairs and make sure that no person is beneath
the stairrobot
• One operator will use the remote control button panel and drive the loaded stairrobot
up the stairs. The other will firmly hold the load support strap; this will enable him to
‘feel’ the balance of the load. He also uses it to restrain the load if necessary and
helps its forward movement at the top of the stairs
• The control operator will press the forward button to drive the stairrobot over the lead
on ramp and up the stairs. He will keep the load level by adjusting the platform
position using the up or down button.
• The up or down button can be pressed simultaneously with either forward or reverse
Press and the platform will lower
Press and the platform will lift
Press and the stairrobot will drive forward
Press and the stairrobot will reverse
Page 17 of 28