















10
3. Enter the distance from the IMU to the GNSS antenna using the SETIMUTOANTOFFSET command.
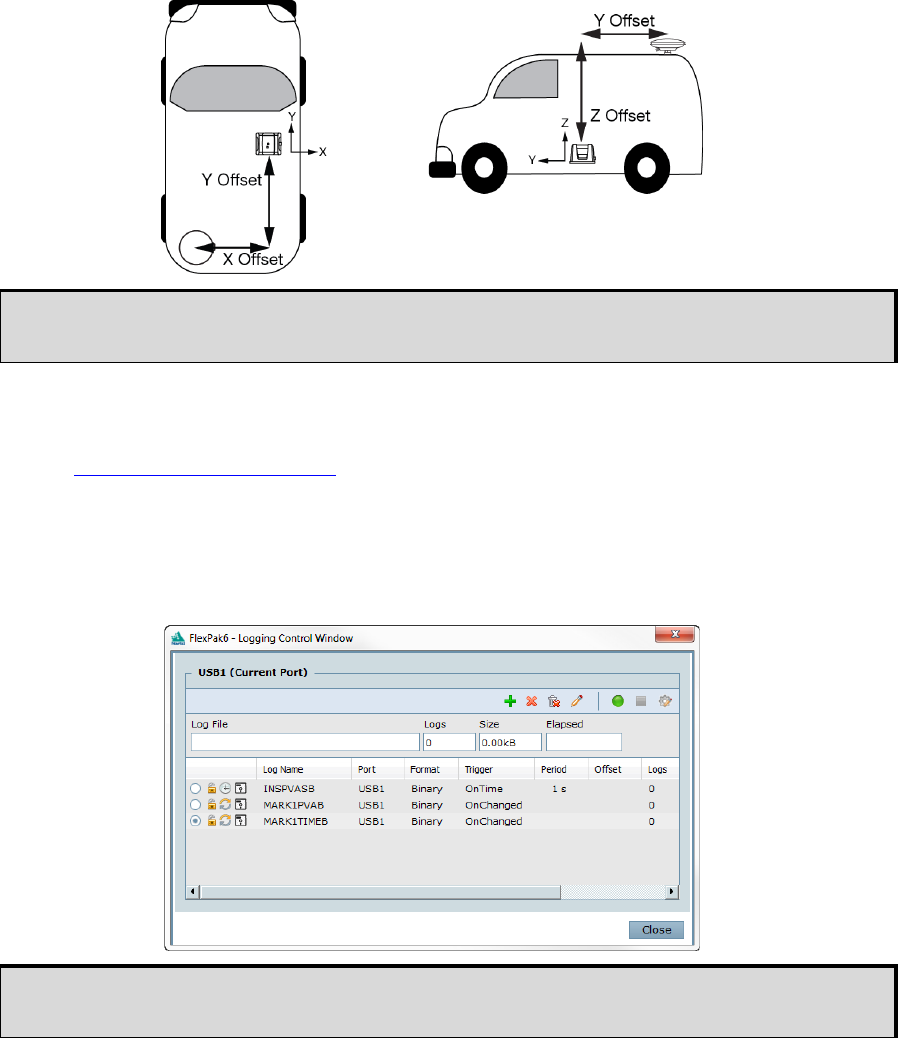
The X (pitch), Y (roll) and Z (azimuth) directions are clearly marked on the IMU enclosure. The
SETIMUTOANTOFFSET parameters are (where the standard deviation fields are optional):
x_offset y_offset z_offset [x_stdev] [y_stdev] [z_stdev]
A typical RTK GNSS solution is accurate to a few centimetres. For the integrated GNSS/INS system to
have this level of accuracy, the offset must be measured to within a centimetre.
4. Perform a kinematic alignment.
See the SPAN on OEM6 User Manual
for more information.
LOG SPAN DATA
Navigation data (position, velocity, attitude) is available from the system as ASCII or binary logs.
Data can be collected through NovAtel Connect using the Logging Control Window, or sent out the
receiver COM port to user supplied data collection software.
This example assumes a default mounting configuration with a -X offset, -Y offset and +Z
offset.
The figure shows the recommended logs for optimal real-time performance.