



















Serial (RS-232) Controls and Operation
124 AX1500 Motor Controller User’s Manual Version 1.9b. June 1, 2007
Communication Settings
The AX1500 serial communication port is set as follows:
9600 bits/s, 7-bit data, 1 Start bit, 1 Stop bit, Even Parity
Communication is done without flow control, meaning that the controller is always ready
to receive data and can send data at any time.
These settings cannot be changed. You must therefore adapt the communication setting
in your PC or microcomputer to match those of the controller.
Establishing Manual Communication with a PC
The controller can easily be connected to a PC in order to manually exercise its capabilities.
Simply connect the supplied cable to the AX1500 on one end (DB-15 connector) and to a
free COM port on the other end (DB-9 connector).
Once connected, you will need a Terminal Emulation program to display the data received
from the controller on the PC’s screen and to send characters typed on the keyboard to the
controller. All Windows PC’s come with the Hyperterm terminal emulation software.
Locate the Hyperterm launch icon in the Start button: Programs > Accessories > Commu-
nication folder.
You will need to configure Hyperterm to use the COM port to which you have connected
the controller (typically COM1) and to configure the communication settings as described
in the section above.
To save time and avoid errors, a hyperterm configuration file is automatically installed in
your PC’s Start button menu when the Roboteq’s Roborun utility is installed (See “Down-
loading and Installing the Utility” on page 161). The configuration file is set to use the
1
2
3
4
7
8
9
5
1
2
3
4
5
6
7
8
9
6
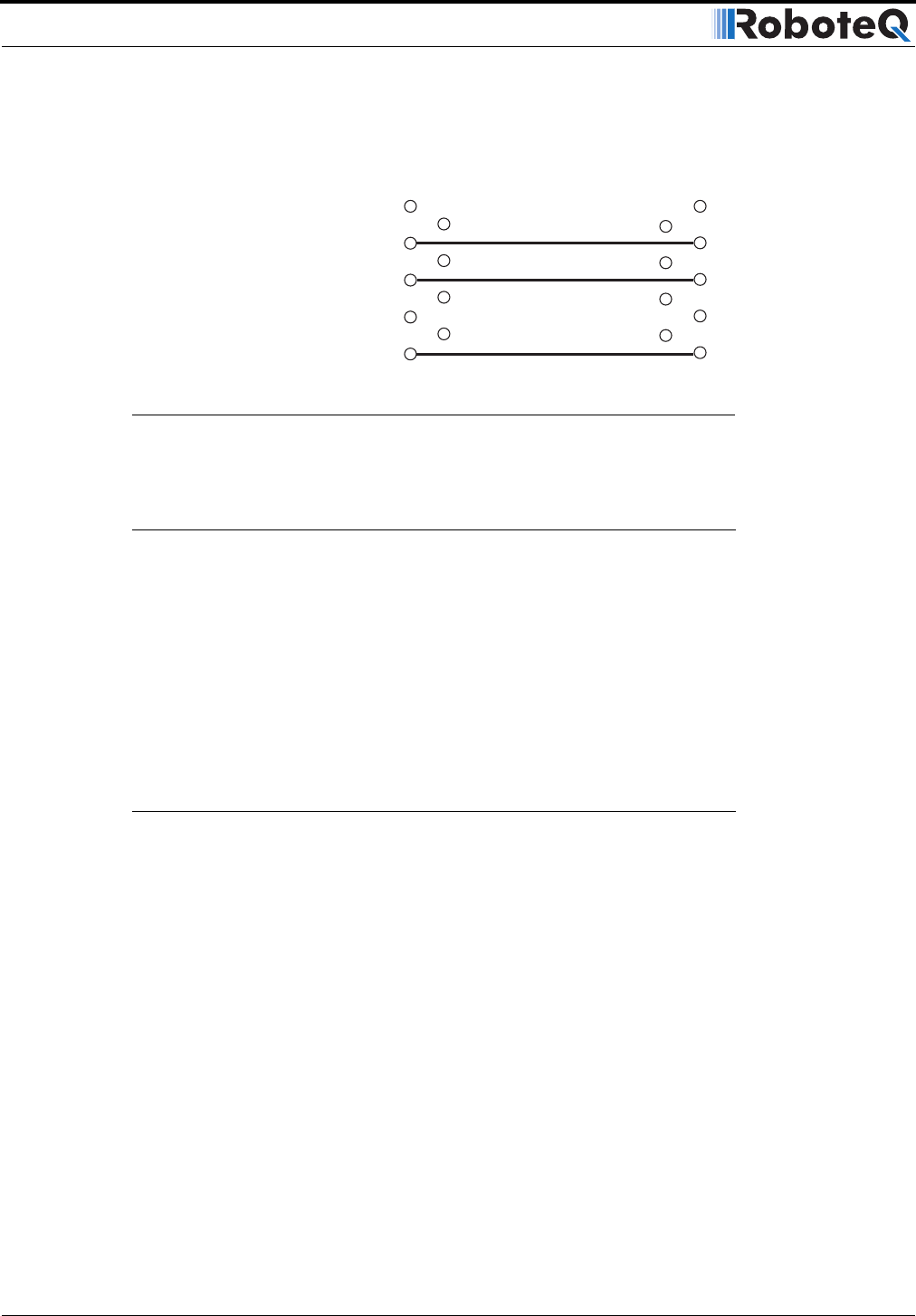
TX Data
RX Data
Data Out
Data In
GNDGND
DB9 Female DB9 Male
FIGURE 81. RS232 extension cable/connector wiring diagram