



















Using the Roborun Configuration Utility
168 AX1500 Motor Controller User’s Manual Version 1.9b. June 1, 2007
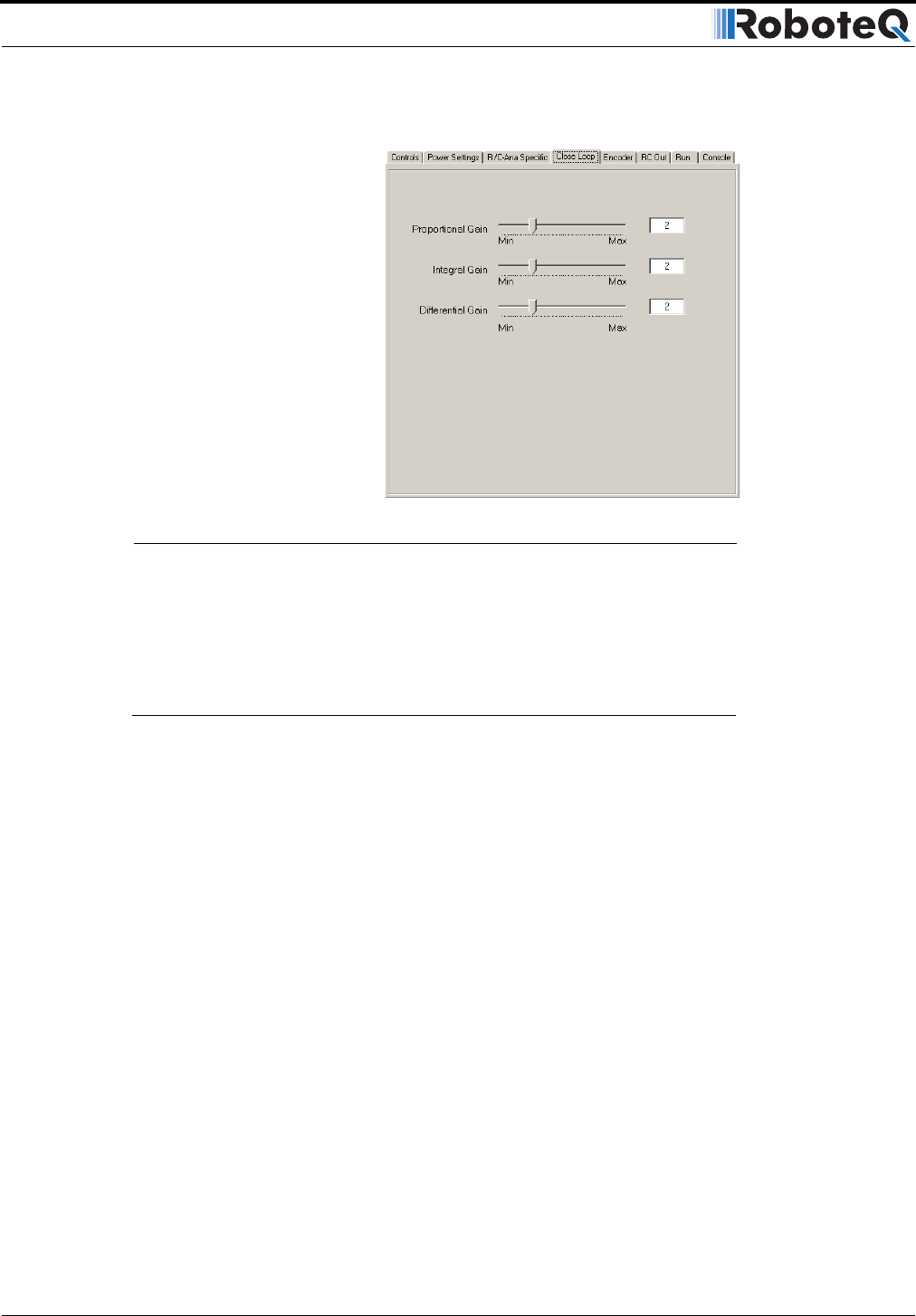
Closed Loop Parameters
The screen shown in Figure 93 is used to set the Proportional, Integral and Differential
gains needed for the PID algorithm. These PID gains are loaded after reset and apply to
both channels. Gains can be changed individually for each channels and on-the-fly using
RS232 commands. These parameters are used in the Position mode (see page 81) and the
Closed Loop speed mode (see page page 93).
Encoder Setting and Testing
Extensive diagnostic, calibration, setting and testing support is provided in the Roborun PC
utility. Basic instructions on how to install and run the PC utility can be found in “Using the
Roborun Configuration Utility” on page 161.
Once the utility is up and running and the controller found and identified, click on the
“Encoder” tab to bring up the Encoder configuration and setup screen show in Figure 94
below.
FIGURE 93. Closed Loop parameter setting screen