



















29
4. Programming your Application
The control of the board is by commands and parameters,
described below. You may either use them directly (see also
section D.3), or call an ActiveX (see section 4.3) that does the
work.
4.1 Commands
_ <c/r> signifies a carriage return.
Note about High Speed Commands:
Single character commands (where no <c/r> is required) are used for quick
direct access/control of the card.
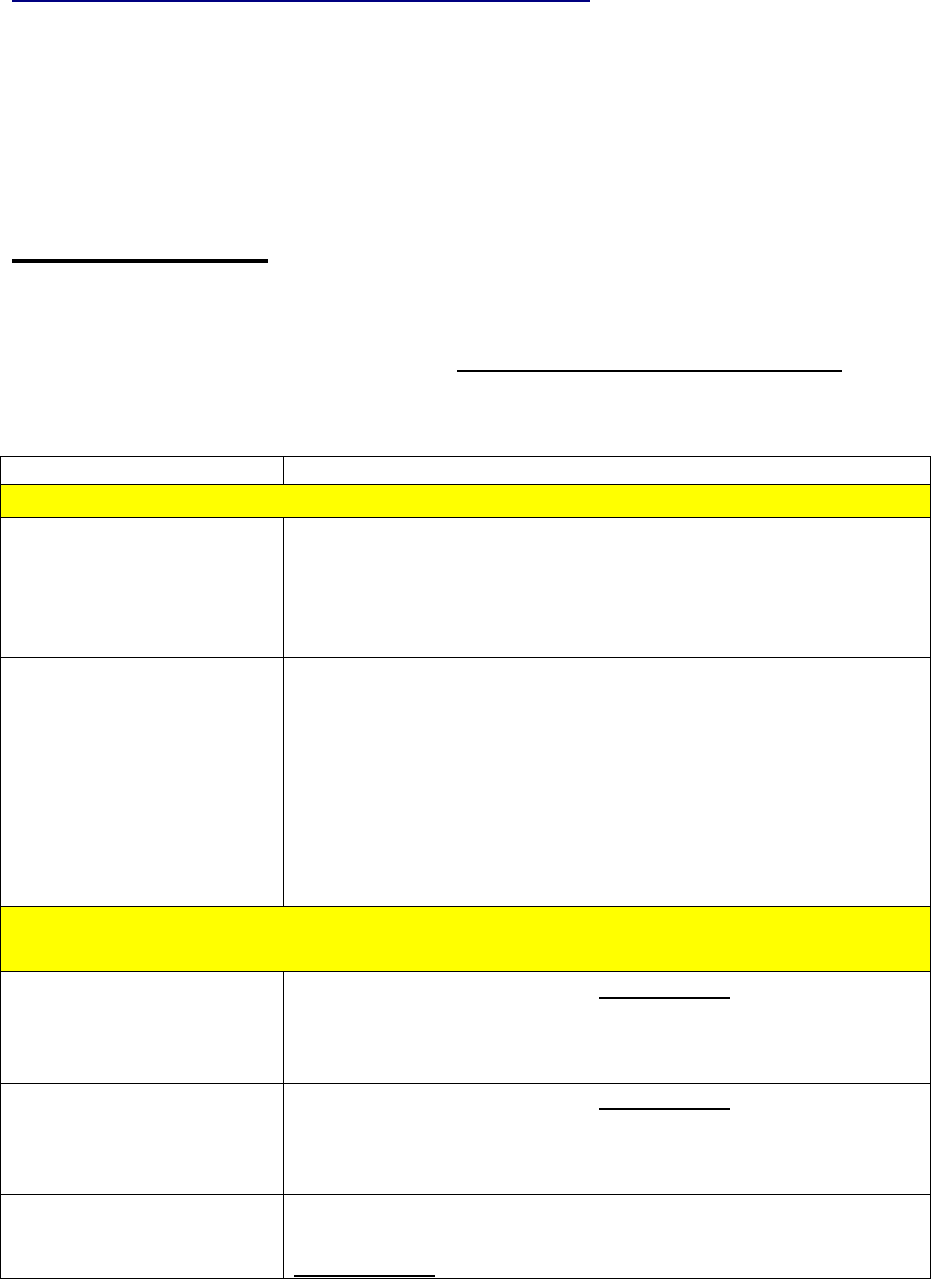
Command
Action
a. Parameters: Read & write:
Rnn<c/r>
Read parameter #nn.
All values are returned in floating point scientific format,
preceded by nn<c/r> echo and appended by a c/r. E.g.,
the answer to ‘R23<c/r>’ is ‘23<c/r>2.560000e+02<c/r>’
indicating that the value of Filter1 is 256.
Wnn<c/r>argument<c/r>
(upper case W)
Write the value argument to parameter #nn.
Floating point values can either be normal or scientific
representation. For example 0.003 could be sent as it is or
as 3.0E-03.After the ‘Wnn<c/r>’ the board echoes
‘nn<c/r>’ and after the ‘argument<c/r>’ the board responds
‘argument<c/r>OK<c/r>’. For example, PC sends
‘W23<c/r>’, the board answers ‘23<c/r>, the PC then
sends ‘123<c/r>’ and the board answers
‘123<c/r>OK<c/r>’ changing Filter1 to 123.
b. Fast Mode: Start & stop
(the Fast Mode is not available with RS485):
u
(lower case u)
Start a ‘Fast Mode’ session using Filter1 (no LED update).
Terminated by the ‘x’ command.
A timer stamp is appended. Its value is the time elapsed
from start of transmission until end of transmission, in ms.
U
(upper case U)
Start a ‘Fast Mode’ session using Filter2 (no LED update).
Terminated by the ‘x’ command.
A timer stamp is appended. Its value is the time elapsed
from start of transmission until end of transmission, in ms.
x
(lower case x)
Exit Fast Mode and return to general mode.
In order to exit the fast mode, the ‘x’ command should be
synchronised, that is, issued upon receiving a block.