



















Chapter 1 Introduction
© National Instruments Corporation 1-5 Xmath Model Reduction Module
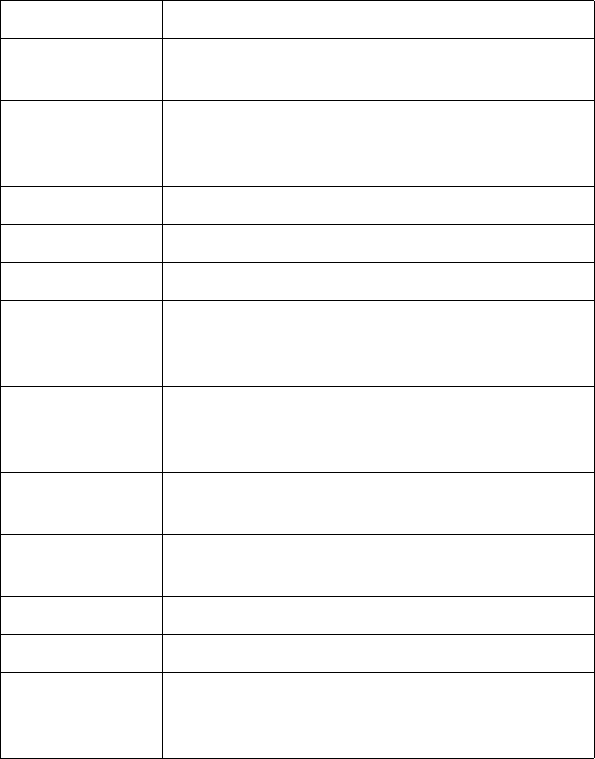
Certain restrictions regarding minimality and stability are required of the
input data, and are summarized in Table 1-1.
Documentation of the individual functions sometimes indicates how the
restrictions can be circumvented. There are a number of model reduction
methods not covered here. These include:
• Padé Approximation
• Methods based on interpolating, or matching at discrete frequencies
Table 1-1. MRM Restrictions
balance( )
A stable, minimal system
balmoore ( ) A state-space system must be stable and minimal,
having at least one input, output, and state
bst( ) A state-space system must be linear,
continuous-time, and stable, with full rank along
the jω-axis, including infinity
compare( ) Must be a state-space system
fracred( )
A state-space system must be linear and continuous
hankelsv( ) A system must be linear and stable
mreduce( ) A submatrix of a matrix must be nonsingular
for continuous systems, and variant for discrete
systems
mulhank( )
A state-space system must be linear,
continuous-time, stable and square, with full
rank along the jω-axis, including infinity
ophank( )
A state-space system must be linear,
continuous-time and stable, but can be nonminimal
redschur( ) A state-space system must be stable and linear,
but can be nonminimal
stable ( ) No restriction
truncate( )
Any full-order state-space system
wtbalance( )
A state-space system must be linear and
continuous. Interconnection of controller and plant
must be stable, and/or weight must be stable.