



















Chapter 4 Frequency-Weighted Error Reduction
© National Instruments Corporation 4-7 Xmath Model Reduction Module
Matrix algebra shows that C(s) can be described through a left or right
matrix fraction description
with D
L
, and related values, all stable transfer function matrices.
In particular:
For matrix C(s), the left and right matrix fraction descriptions are distinct
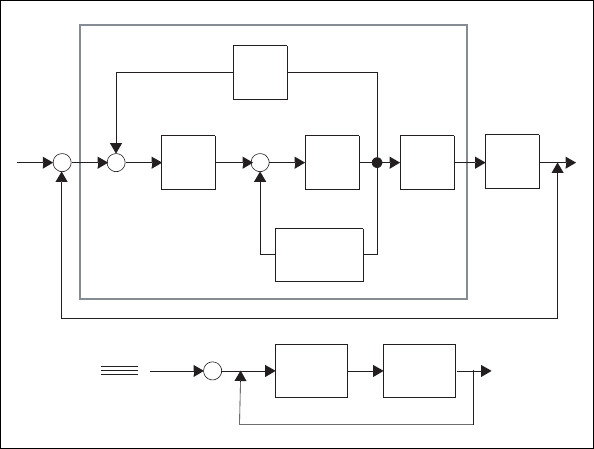
entities. It is the right MFD which corresponds to Figure 4-1; refer to
Figure 4-2.
Figure 4-2. C(s) Implemented to Display Right MFD Representation
Cs() D
L
1–
s()N
L
s() N
R
s()D
R
1–
s()==
D
L
IK
R
sI A– K
E
C+()
1–
B+=
N
L
K
R
sI A– K
E
C+()
1–
K
E
=
N
R
K
R
sI A– BK
R
+()
1–
K
E
=
D
R
ICsIA– BK
R
+()
1–
K
E
+=
Cs() Ps()
+
-
K
E
Ps()
+
-
1
s
---
K
R
++
C
ABK
R
–
+
-