



















Chapter 4 Frequency-Weighted Error Reduction
© National Instruments Corporation 4-21 Xmath Model Reduction Module
The four schemes all produce different HSVs; it follows that it may be
prudent to try all four schemes for a particular controller reduction. Recall
again that their relative sizes are only a guide as to what can be thrown away
without incurring much error. There is no simple rule to indicate which of
the four schemes will be the most effective at controller reduction.
Two rough rules can, however, be formulated.
• Problems with instability through reduction to too low a controller
order are more likely with
"left perf" and "right perf" than
"left stab" or "right stab".
• If the controller has been designed using the loop transfer recovery
idea,
"left stab" will probably be attractive if the input noise
covariance is very large, and
"right stab" will probably be
attractive if the output weighting in the performance index is very
large, [LiA90]. The reduced controllers will then actually be very
similar to those obtained using
wtbalance( ) with the option
"input stab" in the first case and "output stab" in the second
case.
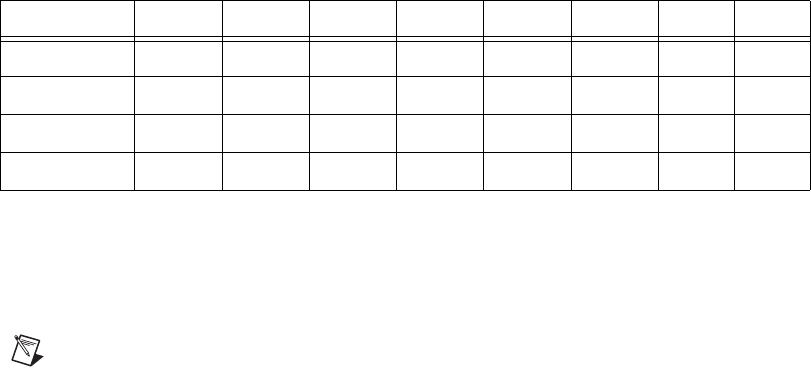
One example gives the HSVs summarized in Table 4-3 for an eighth order
controller.
The most attractive candidate for reducing to second order is
right stab.
This is because the HSVs being discarded (columns 3 to 8) are smaller
relative to those being retained (columns 1 and 2) for
right stab than for
the other three candidates.
Note The relative values count, not the absolute values.
Related Functions
redschur(), wtbalance()
Table 4-3. HSVs for an Eighth Order Controller
1 2 3 4 5 6 7 8
right perf
.0339 .0164 .0128 .0102 .0040 .0037 .0000 .0000
left perf
4.9075 4.8742 3.8457 3.7813 1.2255 1.1750 .5055 .0413
right stab
3.3081 .7278 .1123 .0783 .0242 .0181 .0107 .0099
left stab
1.3914 1.317 1.1269 1.0862 .9638 .5846 .5646 .3144