Quick Start
Connected
P2OS v1.F 13.2*
Operating the Saphira Demonstration Client
When communications between the Saphira client and your robot’s servers are
established, the robot becomes responsive and intelligent. For example, although it
may drive toward an obstacle, your Pioneer 2-DXe will not crash (unless its obstacle-
avoidance behaviors have been disabled) because it can detect and actively avoid
collisions.
Engage the robot’s motors (white MOTORS button) after connecting
or it won’t move, no matter how excited you get.
Table 1. Keyboard-controlled behaviors
KEY ACTION
i,
↑
Increment forward velocity
m,
↓
Decrement forward velocity
j,
←
Incremental left turn
l,
→
Incremental right turn
k, space All stop
g Toggle constant velocity
c Toggle obstacle avoidance
Collision avoidance is just one of the
many mobile robot behaviors
available through Saphira and other
client software available from
ActivMedia Robotics, including the
ActivMedia Robotics Basic Suite,
ARIA, and others. Remember, this
section is meant to familiarize you
with your new robot. Please read the
respective software manuals for how
to get the most out of your robot and
software.
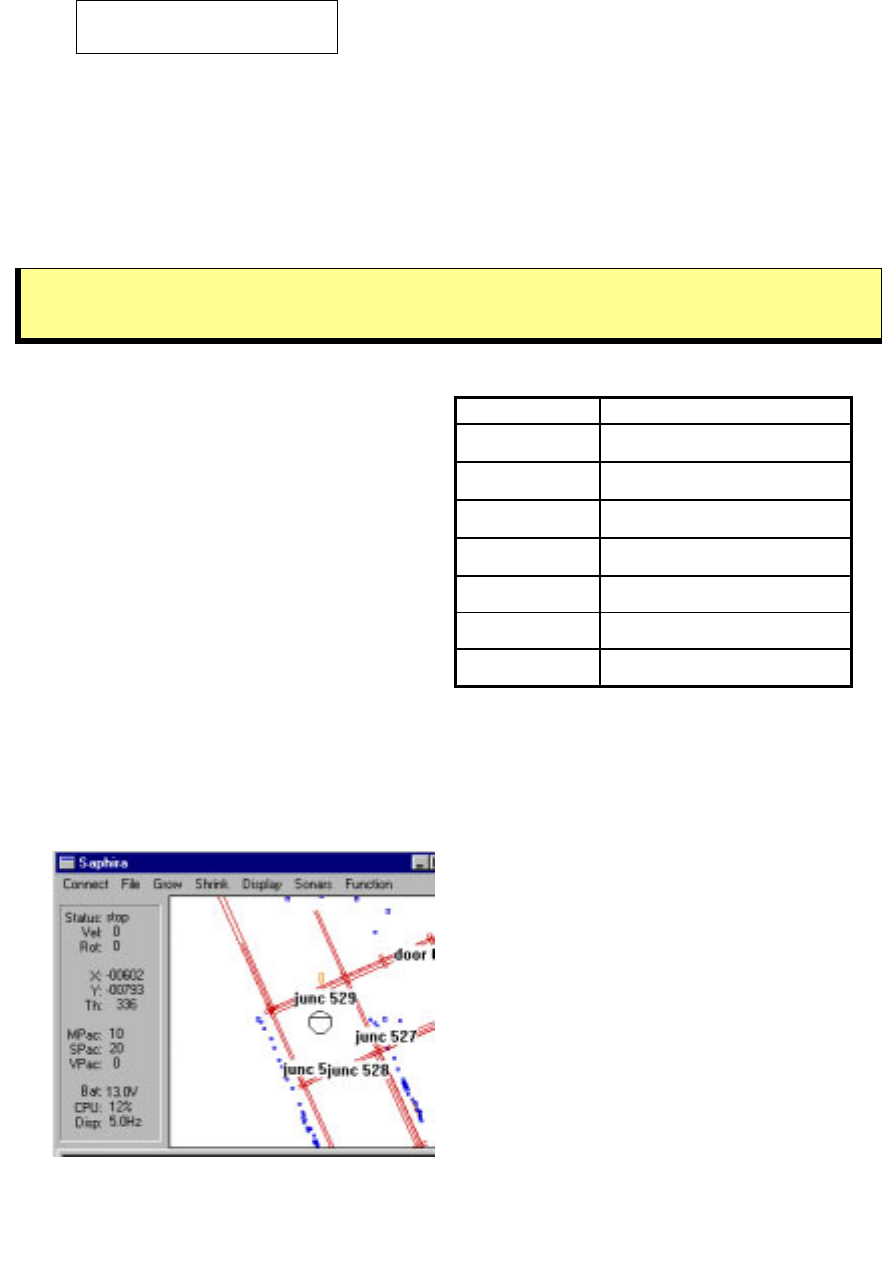
The main window of the Saphira client displays a sonar map built by Saphira as the robot
moves around its environment. Landmarks may be defined as Saphira recognizes and
classifies certain sensor data patterns—walls and openings, for example.
In Figure 17, for example, a Pioneer 2-
DX (center octagon) has identified a
corridor and several doors. Notice
the small dots, which are recent
reflections detected by the front
sonar array? The long lines through
the onscreen sonar artifacts are the
calculated corridor’s geometry. The
rectangles directly ahead of the
robot represent an obstacle
“detected and of interest” to the
robot. One of Saphira’s behaviors,
by the way, is to have your robot seek
and traverse the center of a corridor.
Figure 16. The main window of a robot-
connected Saphira client
You may enable and disable Saphira
behaviors that intelligently guide your
ActivMedia robot by selecting or
deselecting them from menu items in
the Saphira client and from the client keyboard. These include manual drive operation
and disabling/enabling obstacle avoidance and constant velocity behaviors.
22















































































