ActivMedia Robotics
When manually joysticking the robot, each keypress moves the robot forward or
backward faster or slower and incrementally changes its direction. For instance, when
turning, it is often useful to press the left- or right-turn key rapidly several times in a row,
because the turn increment is small.
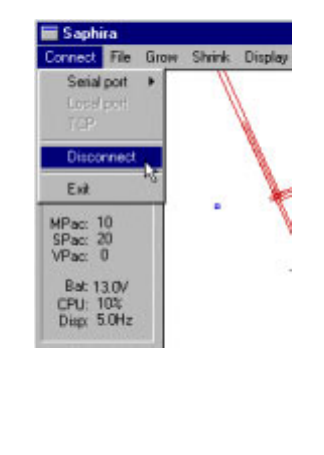
Disconnecting Serial Communications (intentionally or unintentionally)
When you finish playing with your robot, pull down
the Saphira client’s Connect menu and choose
the Disconnect option.
Your Pioneer 2 or PeopleBot will disengage its drive
motors and stop moving automatically, and its
sonar should stop firing. The LCD also should return
to the waiting-state message. You may now slide
the robot’s Main Power switch to OFF.
Quickstart Troubleshooting
You must have a valid Saphira license to connect
with a robot. Unlicensed Saphira clients may only
connect with the simulator. Licensed versions of
Saphira come with the robot and can be
downloaded by customers from the ActivMedia
Robotics support website:
Figure 18. Please, gracefully
disconnect the Saphira client
from the robot server.
http://robots.activmedia.com.
Most problems occur when attempting to connect the Saphira client with a robot for the
first time. Make sure you have Saphira properly installed and its related environment
variables set. It's also a good idea to recheck that the serial cable is plugged into a
working serial port on your computer.
UNIX and Linux users should be sure they have permission to read/write the connection
serial port. On the server side, make sure your radio modem is ON, if that is the
connection route.
If you access the wrong serial port, the Saphira demonstration program will complain,
"Error opening" that selected serial port. If the robot server isn't listening, or if the serial link
is severed somewhere between the client and server (cable loose, or a modem OFF, for
instance), the client will attempt to "Syncing 0" six times and fail with a "Connection
refused." In that case, reset the robot and check your serial connections. For instance,
if you are using the InfoWave radio modems, the DCD lamp on the host should light up.
If it doesn't, it means it cannot find the one in the robot.
Once successfully connected, remember that the robot won't move unless its motors are
engaged, and that you have to manually engage the motors just after you make a
connection with a client, not beforehand.
If for some reason, communications get severed between the Saphira client and P2OS
server, but both the client and server remain active, you may revive the connection with
little effort: If you are using radio modems, first check and see if the robot is out of range.
To test for range limits, simply pick up the robot and move it closer to the basestation
radio modem. If the robot was out of range, the connection should resume. If not,
check to make sure that radio modems were not inadvertently switched OFF.
Communications also will fail if the client and/or server is somehow disabled during a
session. For instance, if you inadvertently switch off the robot’s Main Power or press the
23















































































