



















ActivMedia Robotics
provides very reliable links; radio modem-mediated communication is much less reliable.
Accordingly, when designing client applications that may use radio modems, do not
expect to receive every information packet intact, nor can you expect the server to
accept every command.
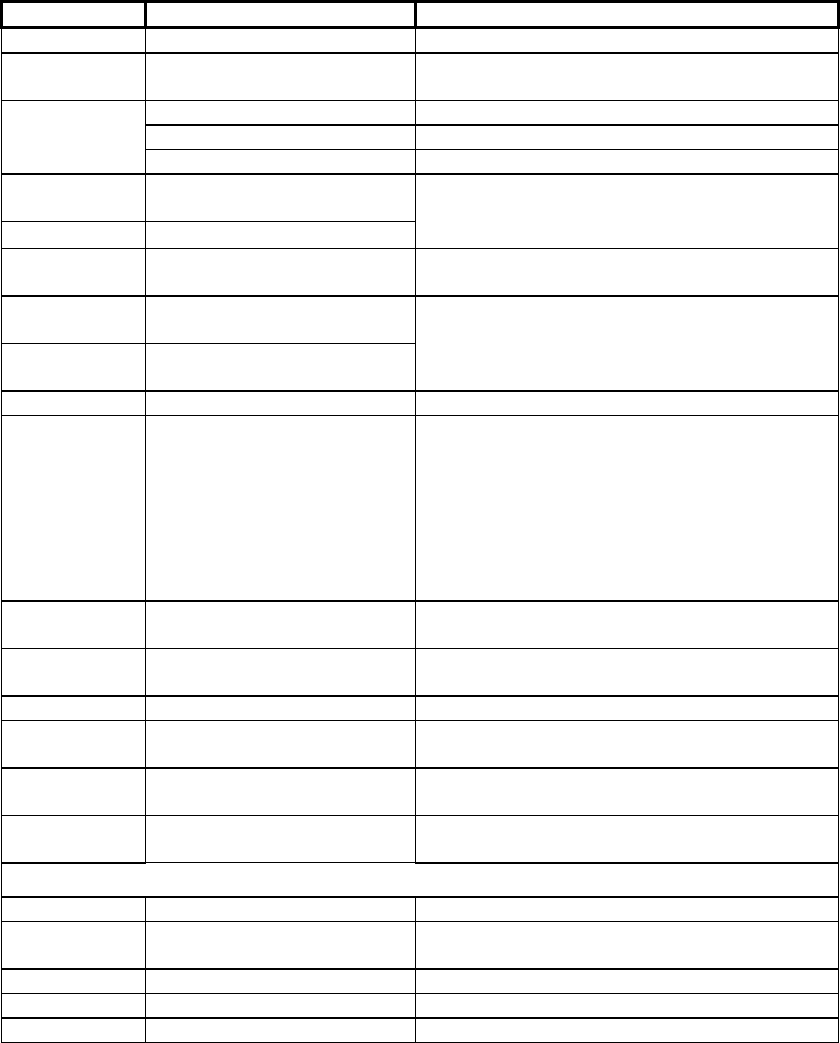
Table 4. Standard P2OS Server Information Packet (SIP)
Name Data Type Description
Header integer Exactly 0xFA, 0xFB
Byte Count byte Number of data bytes + 2 (checksum); must be
less than 201 (0xC9)
Status/Packet byte = 0x3S; where S = Motors status
Type 2 Motors stopped
3 Robot moving
Xpos unsigned integer (15 ls-bits) Wheel-encoder integrated coordinates; platform-
dependent units; multiply by DistConvFactor
‡
Ypos unsigned integer (15 ls-bits) to convert to millimeters.
Th pos signed integer Orientation in platform-dependent units—
multiply by AngleConvFactor
‡
for degrees.
L vel signed integer Wheel velocities (respectively Left and Right)
in platform-dependent units;
R vel signed integer multiply by VelConvFactor
‡
—currently 1.0 for
all—to convert into millimeters per second.
Battery byte Battery charge in tenths of volts
Stall and
Bumpers
integer Motor stall and bumper accessory indicators. Bit
0 of the lsbyte is the left wheel stall indicator =
1 if stalled. Bits 1-5 of that same byte
correspond to the bump switch states (1=on) for
the rear bumpers accessory. Bit 0 of the msbyte
is the right wheel stall; the bits 1-5 of that same
msbyte correspond to the front bumpers switch
states.
Control signed integer Setpoint of the server’s angular position servo—
multiply by AngleConvFactor
‡
for degrees
FLAGS
(was PTU)
unsigned integer b0 – motors flag (1=motors enabled)
b1 – sonar flag: enabled if 1.
Compass byte Compass heading in 2-degree units
Sonar
readings
byte Number of new sonar readings included in
information packet; readings follow:
Sonar
number
byte Sonar number
Sonar
range
unsigned integer Sonar range; multiply by RangeConvFactor
‡
—
currently 0.268 for all—for millimeters
…rest of the sonar readings…
Timer unsigned int Selected analog port number 1-5
Analog byte User Analog input (0-255=0-5 VDC) reading on
selected port
Digin byte User I/O digital input
Digout byte User I/O digital output
Checksum integer Checksum (see previous section)
‡
Factors
see Table 17 Appendix D and Saphira
’
s parameter definition file for your robot
Because of the real-time nature of the client/server interaction, we made a conscious
decision to provide an unacknowledged packet interface. Re-transmitting server
information or command packets would serve no useful purpose, because old data
would be virtually useless in maintaining responsive client-server interaction.
31