



















6-5
CHAPTER 6 Increasing the robot operating speed
(4) Increasing the speed by the OUT effective position parameter
[Also refer to:] Robot controller owner's manual
("Axis parameters" – "Out effective Position" in Chapter 4)
Programming manual
(OUTPOS statement in "11. Command statements".)
[Example]
From P1 when chuck is open:
OUTPOS (1) = 10000 ...
X-axis OUT effective position (pulses)
:
Increases the OUT effective position.
OUTPOS (2) = 10000...
Y-axis OUT effective position (pulses)
OUTPOS (3) = 10000...
Z-axis OUT effective position (pulses)
OUTPOS (4) = 10000...
R-axis OUT effective position (pulses)
MOVE P, P2, Z=0
DO3 (0) = 1 .................. Chuck closes.
OUTPOS (1) = 2000.....
Returns the OUT effective position to the default value.
OUTPOS (2) = 2000
OUTPOS (3) = 2000
OUTPOS (4) = 2000
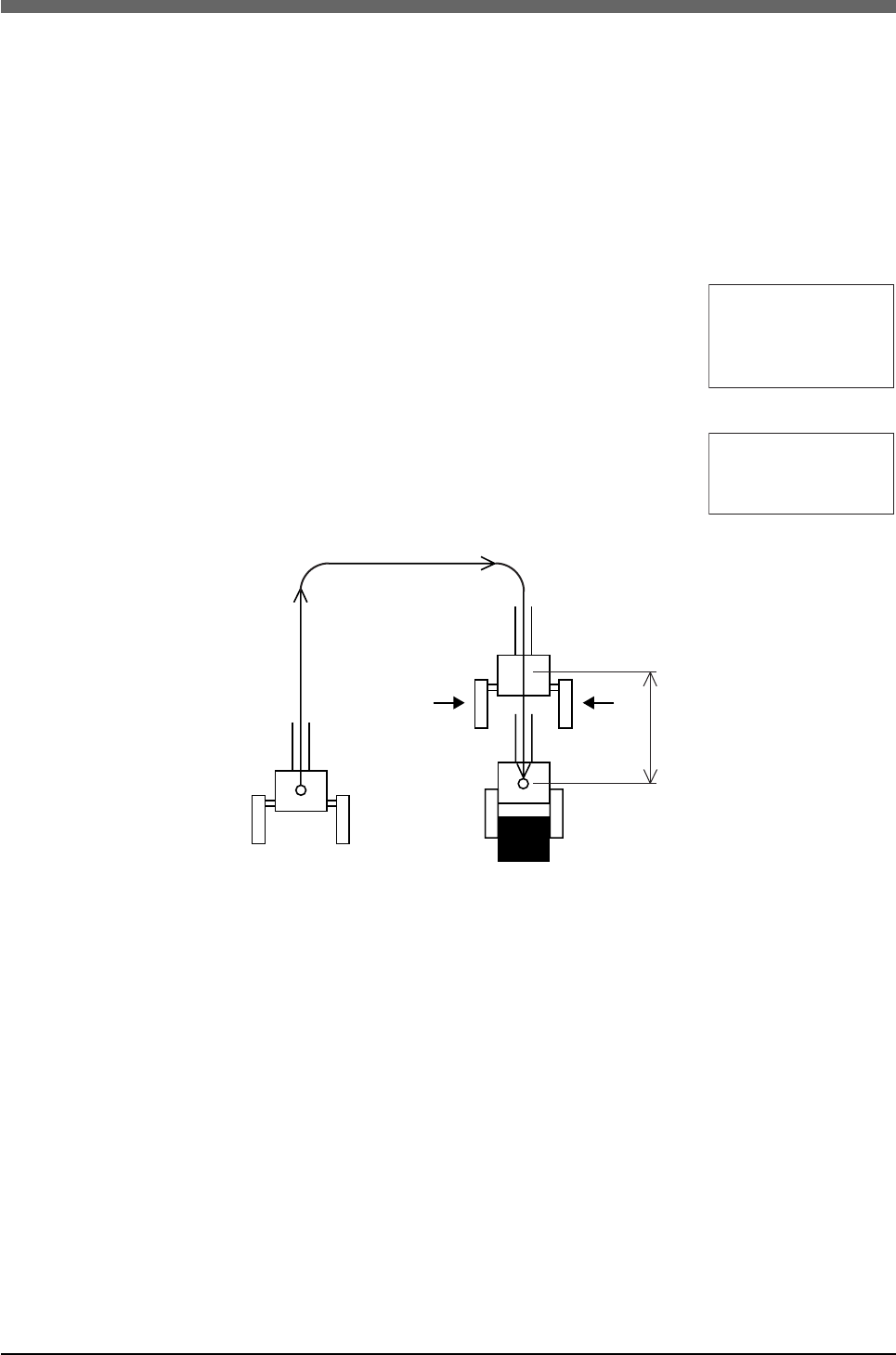
P1
P2
Chuck closed.
Chuck starts closing.
OUT effective position
When all of the X, Y, Z and R axes enter the OUT effective position (10000
pulses prior to P2), the chuck starts closing.
By setting the OUT effective position larger, the chuck starts closing while the
robot arm is still moving at an earlier point, so that the chuck can grip the workpiece
more quickly.
The default value of the OUT effective position is 2000 (pulses).
[Reference]
Relation between X, Y, R-axis rotating angle, Z-axis movement distance and pulse values
The arch position, tolerance and OUT effective position parameters are set in
pulses.
For the relation between X, Y, R-axis rotating angle, Z-axis movement distance
and pulse values, refer to the tables listed under item (4) in "4. Setting the soft
limits". (Chapter 4 in this manual)
The OUT effective position can
be set for each axis.
If the same OUT effective
position is used for all axes, you
can write as "OUTPOS 10000".
If the same OUT effective
position is used for all
axes, you can write as
"OUTPOS 2000".