

















7-5
CHAPTER 7 Specifications
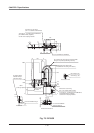
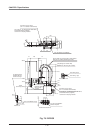
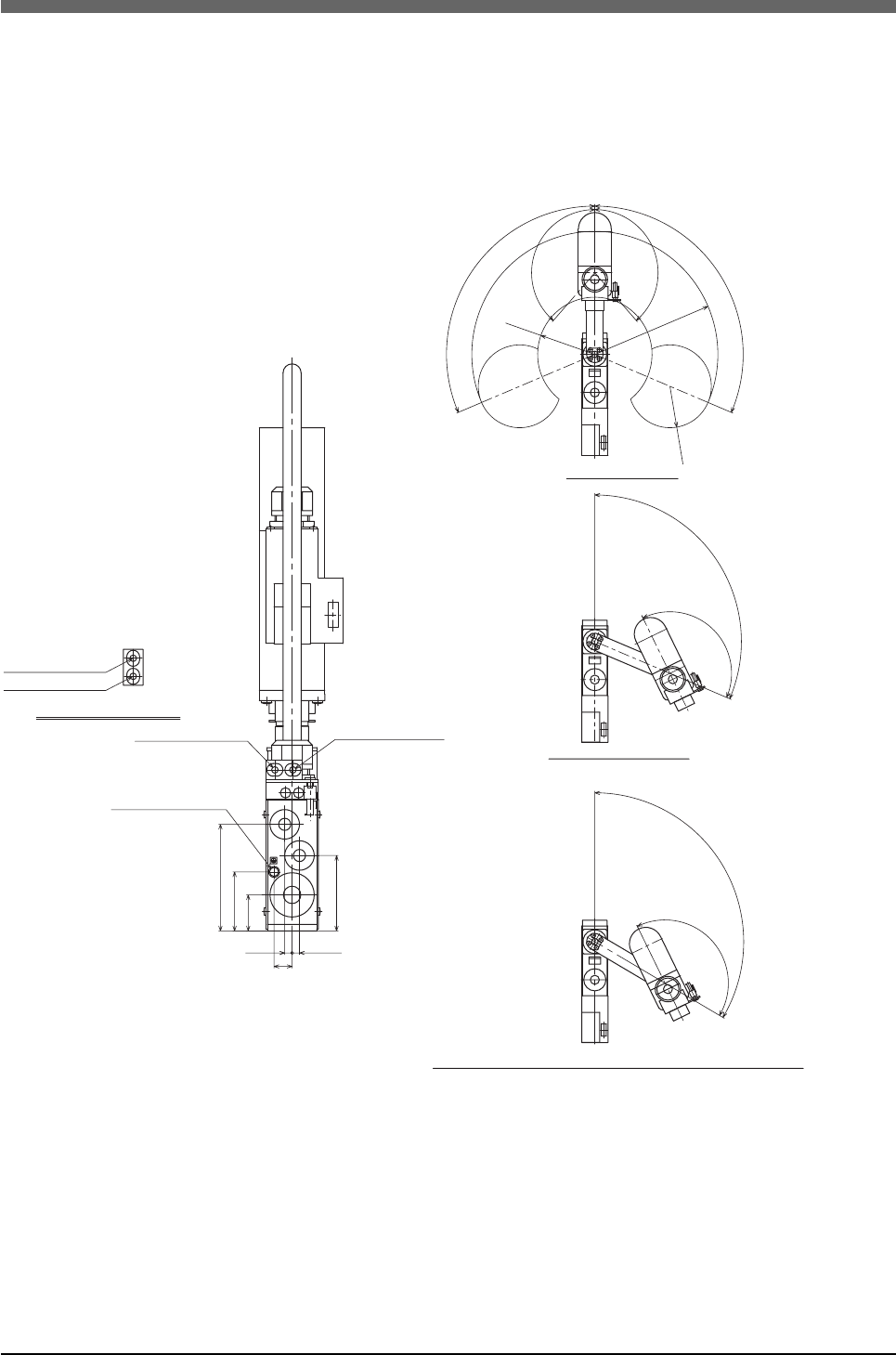
Working envelope
* Take care to prevent interference between the end tool, robot and peripheral devices, etc.
X, Y-axis origin position
X, Y-axis maximum movement position during X, Y-axis absolute reset stopper origin setting
*
When carrying out X, Y-axis absolute reset stopper origin setting, move the X-axis to
a position counterclockwise from this position and the Y-axis to a position clockwise.
User tubing 1 (φ3)
User tubing 2 (φ3)
13
9
°±4°
113 °±4°
147°
121°
User tubing 1 (φ3)
User tubing 2 (φ3)
22
36
46
65
4.5
11
4.5
M3 ground terminal
113°
R50.5
139
°
139°
113°
R150
R
70
Viewed from direction A