



















8 RabbitCore RCM4000
2.2 Hardware Connections
There are three steps to connecting the Prototyping Board for use with Dynamic C and the
sample programs:
1. Prepare the Prototyping Board for Development.
2. Attach the RCM4000 module to the Prototyping Board.
3. Connect the programming cable between the RCM4000 and the PC.
4. Connect the power supply to the Prototyping Board.
2.2.1 Prepare the Prototyping Board for Development
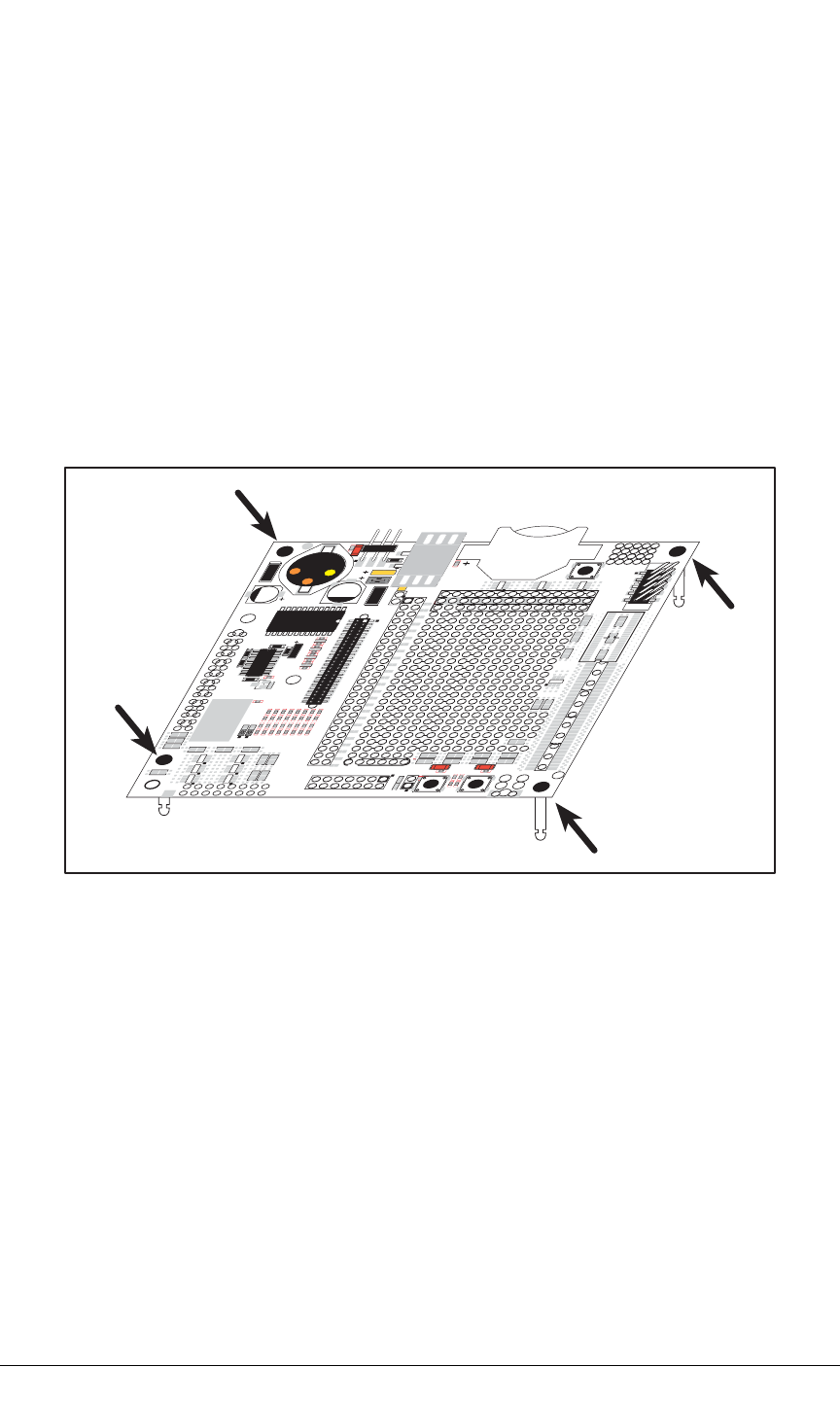
Snap in four of the plastic standoffs supplied in the bag of accessory parts from the Devel-
opment Kit in the holes at the corners as shown.
Figure 2. Insert Standoffs
D
1
R
1
PWR
DS1
GND
J1
U1
C1
GND
C2
JP
1
C
3
D
2
JP
2
C
4
+
3.3 V
J2
R
2
BT1
1
S1
RESET
R
XD
TX
D
TX
C
R
XC
G
N
D
J4
UX
29
RX81
R
X
87
C
X41
RX83
RX11
C
X
39
UX30
UX10
UX12
UX14
UX16
RX79
C
X
29
C
X17
RX67
U
X45
RX
85
GND
GND
GND
1
R24
R22
R21
R23
CX23
RX77
1
R
27
R
28
JP25
CX25
RX75
RX73
CX27
DS3
S3S2
DS2
J3
UX49
UX4
UX47
+5 V
GND
+3.3 V
RCM1
U
2
/RST_OUT
/IOWR
VBAT
EXT
PA1
PA3
PA5
PA7
PB1
PB3
PB5
PB7
PC1
PC3
PC5
PC7
PE1
PE3
PE5
PE7
PD1
LN1
PD3
LN3
PD5
LN5
PD7
LN7
VREF
GND
/IORD
/RST_IN
PA0
PA2
PA4
PA6
PB0
PB2
PB4
PB6
PC0
PC2
PC4
PC6
PE0
PE2
PE4
PE6
PD0
LN0
PD2
LN2
PD4
LN4
PD6
LN6
CVT
AGND
JP
24
JP
23
C
14
C
12
C
10
C
8
C
7
C
9
C
11
C
13
R10
R
8
R
6
R
4
R
3
R
5
R
7
R20
R
18
R
16
R
14
R
13
R
15
R
17
R29
JP
11
JP
15
JP
19
JP
21
JP22
JP20
JP17
JP
13
R19
R9
RX57
RX55
RX97
RX49
U
X33U
X
31
R
X
89
UX3
U
X
37
U
X
42
U
X
41
R
X
63
R
X
65
R
X
61
RX59
R
26
R25
Q1
C15
C
19
C
20
U3
C18
C
17
JP16
JP6
JP5
JP12
JP4
JP3
JP14
JP8
JP7
JP18
JP9
JP10
C16
L1
C6
C5
AG
N
D
C
V
T
LN
6IN
LN
4IN
LN
2IN
LN
0IN
V
R
E
F
LN
7IN
LN
5IN
LN
3IN
LN
1IN
A
G
N
D
A
G
N
D
R
11
R
12
R
X
47
RX43