



















© National Instruments Corporation 2-1 MATRIXx Xmath Robust Control Module
2
Robustness Analysis
This chapter describes RCM tools used for analyzing the robustness
of a closed-loop system. The chapter assumes that a controller has been
designed for a nominal plant and that the closed-loop performance of
this nominal system is acceptable. The goal of robustness analysis is to
determine whether the performance will remain acceptable if the plant
differs from the nominal plant.
Modeling Uncertain Systems
This section describes the method RCM uses to model an uncertain system.
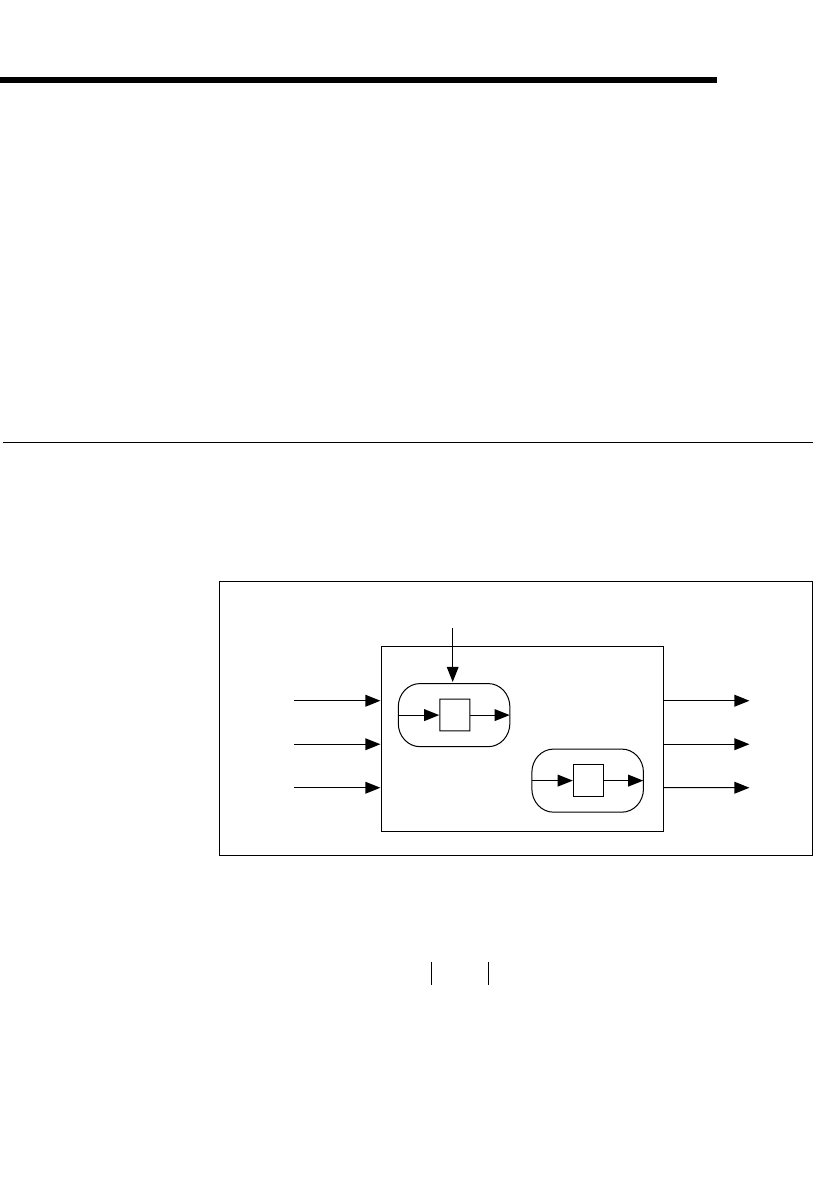
The closed-loop system is modeled as a known or nominal closed-loop
system with input w and output z, together with k unknown or uncertain
transfer functions δ
1
(jω), …, δ
k
(jω), as shown in Figure 2-1.
Figure 2-1. Model of an Uncertain System
The following transfer functions are assumed to be stable:
(2-1)
where the l
i
are given non-negative functions of frequency. This type of
uncertainty model is known as structured nonparametric uncertainties.
To describe this model, you also must describe the nominal closed-loop
Uncertain Transfer Function
Known Nominal
System
w
z
q
1
r
1
δ
1
q
2
r
2
δ
2
δ
i
jω()l
i
jω()≤