



















© National Instruments Corporation 4-1 MATRIXx Xmath Robust Control Module
4
Controller Synthesis
This chapter discusses synthesis tools in two categories, H
∞
and H
2
. This
chapter does not explain all of the theory of H
∞
, LQG/LTR, and frequency
shaped LQG design techniques. The general problem setup is explained
together with known limitations.
H-Infinity Control Synthesis
Problem Definition
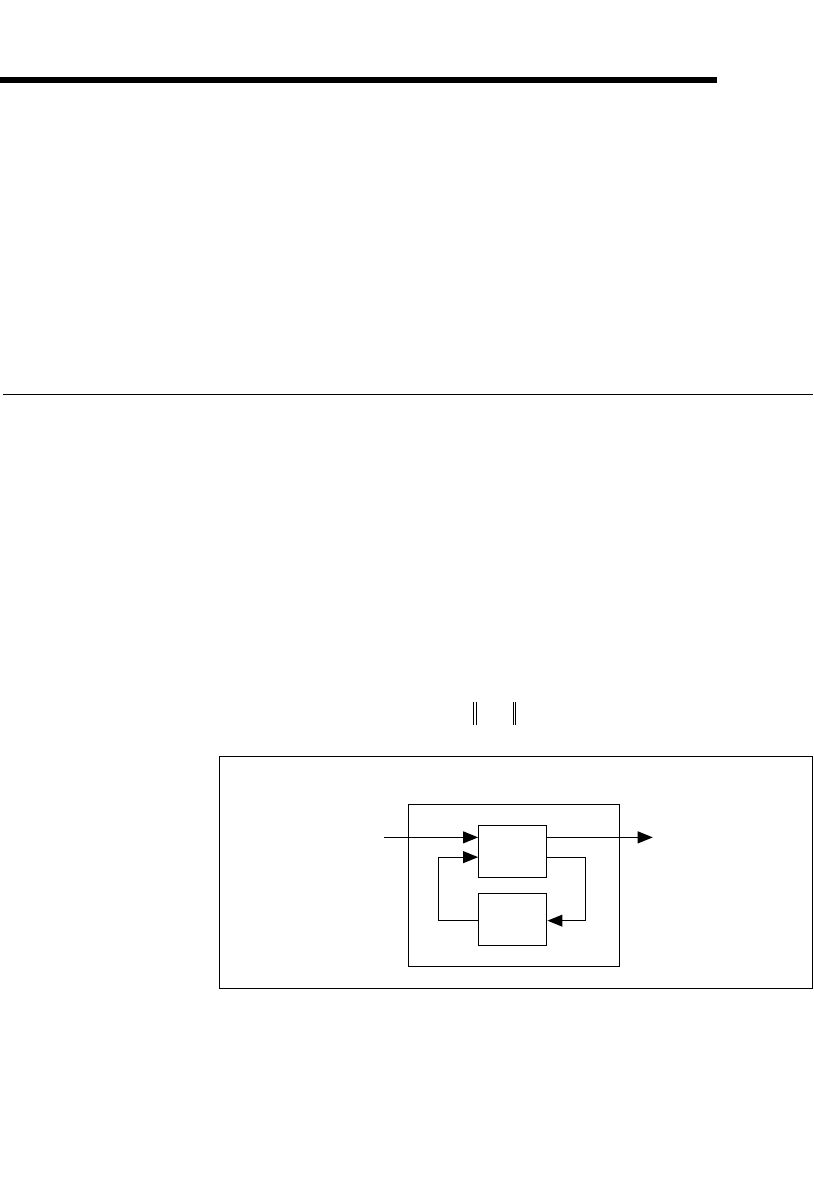
The H
∞
control synthesis function hinfcontr( ) finds a stabilizing
multivariable controller K for the plant P, as shown in Figure 4-1.
In the closed-loop system with plant P and controller K, all frequencies ω,
(4-1)
where H
ew
is the closed-loop transfer matrix from w to e and γ is some
specified limit. Equation 4-1 can be expressed in terms of the H
∞
norm as:
Figure 4-1. Closed-Loop System with Plant P and Controller K
The function hinfcontr( ) is based on the 2-Riccati state space
solutions presented in [GD88,DGKF89]. You can examine these references
for theoretical descriptions.
σ
max
H
ew
jω()()γ≤
H
ew
∞
γ≤
P
w
uy
e
K
H
ew