



















Chapter 2 Robustness Analysis
MATRIXx Xmath Robust Control Module 2-4 ni.com
smargin( )
marg = smargin(SysH, delb {scaling, graph})
The smargin( ) function plots an approximation to the stability margin
of the system as a function of frequency. For a full discussion of
smargin( ) syntax, refer to the MATRIXx Help. The approximation is
exact if the number of uncertain transfer functions is less than four and
scaling="OPT" (optimum scaling).
In other cases, the approximation is generally considered to be extremely
good. Refer to the Approximation with Scaled Singular Values section. The
approximation is always conservative.
smargin( ) always will report a
margin that is less than or equal to the actual margin.
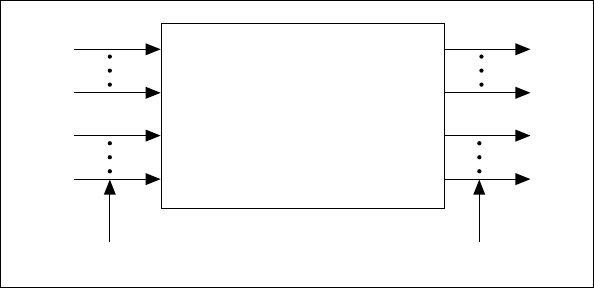
The
smargin( ) function counts the columns in delb to calculate the
number of uncertainties k. It then assumes that the last k inputs of
SysH are
signal r in Figure 2-2, and the last k outputs are signal q. To create a Nominal
System, refer to the Creating a Nominal System section.
Figure 2-2. Nominal Closed-Loop System
Creating a Nominal System
To better understand how to create H(s) in Figure 2-3, you will examine
a SISO tracking system with three uncertainties. δ
1
is a multiplicative
actuator uncertainty, while δ
2
and δ
3
are multiplicative sensor uncertainties.
Known Closed-Loop System
w
r
z
q
H(s)
size
k
size
k