



















Chapter 2 Robustness Analysis
MATRIXx Xmath Robust Control Module 2-6 ni.com
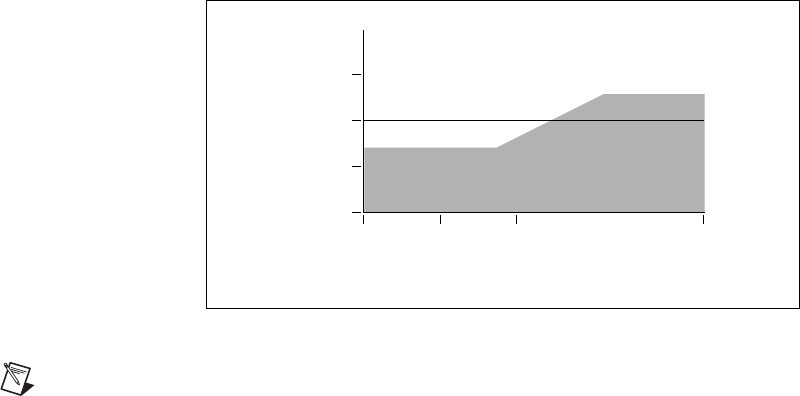
Figure 2-4. Bound for Sensor Uncertainty
Note
A value of l
3
at one radian per second of –20 dB indicates that modeling
uncertainties of up to 10% (–20 dB = 0.1) are allowed.
The actuator and sensor uncertainties δ
1
and δ
2
are bounded by –20 dB
at all frequencies. You will use these values to interpolate to obtain l
3
.
First, create the bound for δ
3
in Hz.
L3 = pdm([-20,-20,10,10],[0.1,1,30,100]/2/pi);
3. Now interpolate to obtain 30 points:
L3 = interpolate(L3,logspace(0.01,10,30),{xlog});
4. Create L1 and L2 (bounds for and ):
L1=-20*ones(L3); L2 = L1;
delb = [L1,L2,L3];
5. Calculate the stability margin:
marg=smargin(H,delb);
smargin --> Scaling algorithm is type: PF
smargin --> Margin computation 10% complete
smargin --> Margin computation 50% complete
smargin --> Margin computation 90% complete
The output indicates that Perron-Frobenius scaling (the default) is
used. Refer to the Approximation with Scaled Singular Values section.
The stability margin plot is shown in Figure 2-5. The minimum margin
is about 8 dB at about 1/2 Hz. This implies that all three l
1
values
(uncertainty bounds) could be increased (relaxed) simultaneously
by 8 dB, and the system would still remain robustly stable.
0.1
1
30 100
10
0
–20
Frequency, Radian/Second
dB
δ
1
δ
2