



















Chapter 2 Robustness Analysis
MATRIXx Xmath Robust Control Module 2-18 ni.com
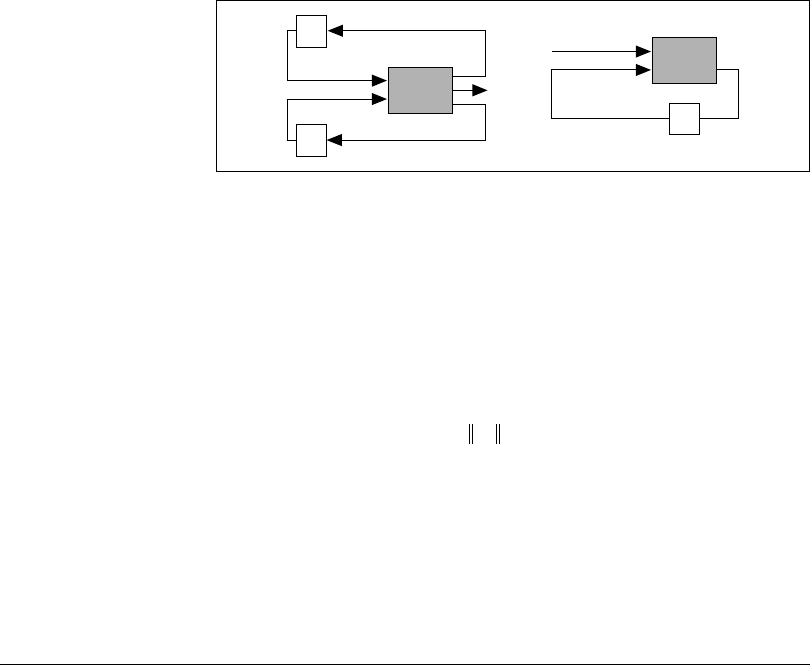
Figure 2-10. Reduction to Separate Systems
In terms of the approximations to the margin discussed above, this
reducibility will manifest itself as a problem such as divide-by-zero or
nontermination. It really means that the minimum of the optimization
problem is not achieved by any finite scaling.
A matrix M can be split into its reducible components using the following
technique (refer to[BeP79]):
1. Form the matrix X =(αI + M)–1
for any
α larger than the spectral
radius of M, for example 2 .
2. Form Y = X + X
T
where Y has a positive i,j entry if and only if δ
i
and δ
j
are in the same reduced system; otherwise, the entries will be zero.
ssv( ) checks for reducibility before invoking a scaling algorithm. The
margins of each of the reduced systems then can be calculated separately,
and the minimum taken.
Worst-Case Performance Degradation (wcgain)
Conversion to a Stability Margin Problem
In [DWS82], it is shown that a simple relation holds between the
worst-case gain defined in Equation 2-3, and the stability margin. For γ > 0,
wcgain (jw) £ g if and only if m(Hred(jw) diag(g-1,
l1(w),...,lk(w)) £ 1
where H
red
is H with the rows and columns corresponding to all inputs and
outputs deleted except the ones of interest (the qth input and the pth output).
This can be interpreted as adding a fictitious uncertain transfer function
from w
q
to z
p
with magnitude bound γ
–1
at the given frequency. This
additional uncertainty is called a performance loop as described in
reference [BoB91].
δ
4
δ
2
δ
1
M