



















140
Trial run at Torque Control Mode
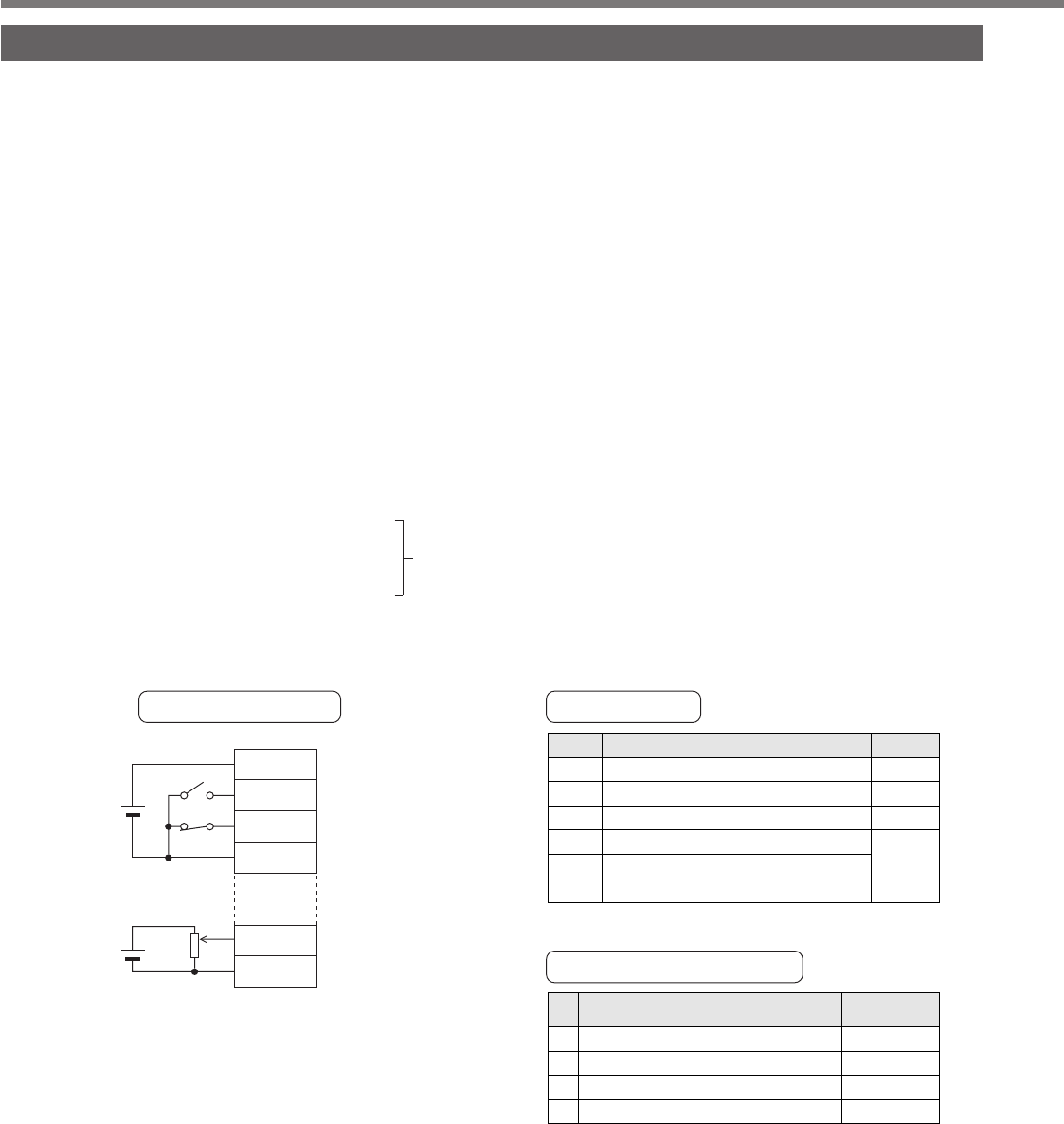
Operation with CN X5 Connected
1) Connect CN X5.
2) Connect the control signal (COM+/COM–) to the power supply (12 to 24 VDC) .
3) Turn the main power (driver) ON.
4) Check the defaults of the parameters.
5) Connect between SRV-ON (CN X5 pin 29) and COM- (CN X5 pin 41) to make Servo-On active. The motor
will be kept excited.
6) Apply an appropriate DC voltage between Torque command input TRQR (CN X5 pin 14) and GND (CN X5
pin 15) and verify the motor rotating direction (CW/CCW) and then reverse the voltage polarity and then
verify reversed motor rotation. Also check the speed set by Pr56.
7) To change torque Pr5C, direction Pr5D and speed limit Pr56 in response to the command voltage,
modify the following parameter.
Pr56: 4th speed
Pr5C: torque command input gain
Pr5D: torque command input inversion
See page 144 "Parameter setting" in Torgue control mode.
COM+
SRV-ON
SPR/TRQR
GND
ZEROSPD
COM–
7
29
14
15
26
41
D
C
1
2V – 24V
ZEROSPD switc
h
Close: Run
Open: Stop
One way
operation
For multi directio
n
(CW and CCW)
operation, use a
bipolar power
source.
DC
10V
Wiring Diagram Parameters
Input Signals Status
PrNo.
No. Input signal
Monitor
display
Pr02
Pr04
Pr06
Pr56
Pr5C
Pr5D
0
2
3
5
+ A
–
–
–
Servo-ON
CW overtravel inhibit
CCW overtravel inhibit
Speed zero clamp
2
1
0
Set as
require
d
Control mode set-up
Overtravel input inhibit
ZEROSPD input selection
4th internal speed
Torque command input gain
Torque command input inversion
ValueParameter description
•
Use the controller to send command pulses.