



















142
Real time auto gain tuning
Outline
Load inertia of the machine is estimated
at real time, and the optimum gain is set
up automatically based on the estimated
result. A load, which has a resonance, also
can be handled owing to the adaptive fil-
ter.
Application range
Under the following conditions, the real time auto gain tuning may not function properly.
In such case, use the normal mode auto gain tuning (see page 193 "Adjustments") or manual gain tuning
(see page 197 "Adjustments").
How to use
[1] Stop the motor (Servo-OFF).
[2] Set up Pr21 (Real-time auto tuning set-up) to 1 – 6.
Set up value before shipment is1.
When the changing degree of the load inertia is too large, set Pr21 to 3 or 6.
When the influence of resonance is conceivable, select “adaptive filter YES”.
[3] Set 0 – 2 to Pr22 (real-time auto tuning machine stiffness).
[4] Turn the servo ON to operate the machine ordinarily.
[5] To increase the response performance, gradually increase Pr22 (Machine stiffness at real-time
auto tuning). When any noise or vibration is found, decrease the Pr22 to a lower value soon.
[6] To store the result, write the data into the EEPROM.
Conditions under which the real time auto gain tuning is prevented from functioning
• When the load inertia is smaller/larger than the rotor inertia
(3 times or less; or 20 times or more)
• When the load inertia fluctuates
• When the machine stiffness is extremely low
• When any unsecured part resides in such as backlash, etc.
• In case of a continuous low speed operation under 100 [r/min].
• In case of soft acceleration/deceleration under 2000 [r/min] per 1 [s].
•
When acceleration/deceleration torque is smaller than unbalanced load/viscous friction torque.
Load
Load inertia
Operation pattern
Setting value
0
[1]
2
3
4
5
6
7
Real-time auto tuning
Not used
Used
Not used
Changing degree of load inertia during operation
–
Little change
Change slowly
Change s haply
Little change
Change slowly
Change s haply
–
Adaptive filte
r
No
Yes
No
Yes
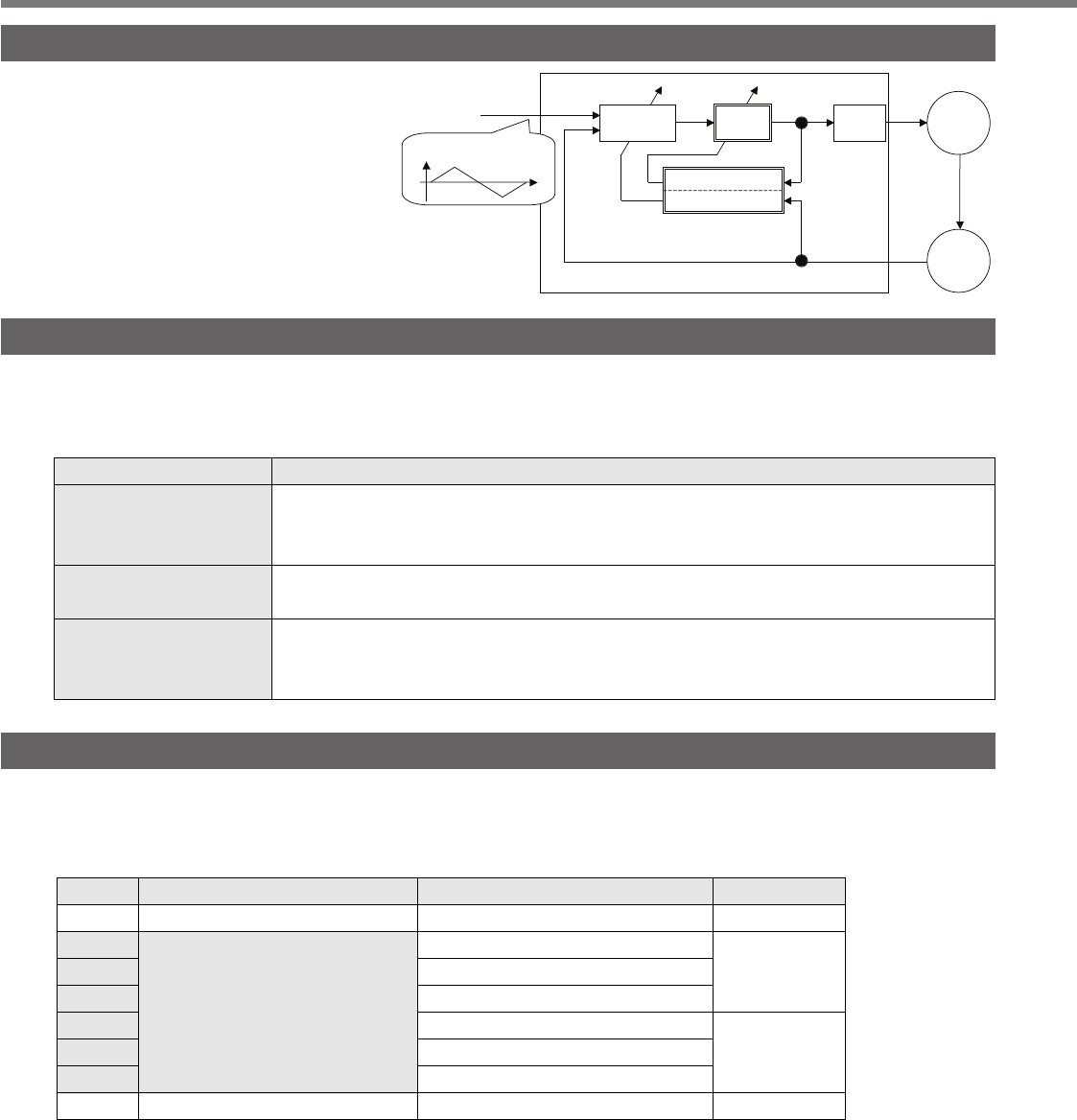
Operation command under
actual operation conditions
Position/speed
command
Gain auto
setting
Position/speed
control
Applied
filter
Resonant frequency estimate
Load inertia estimate
Real time auto
gain tuning
Servo driver
Current
control
Motor
current
Motor
speed
Filter auto
tuning
Torque
command
Motor
Encoder