



















144
Parameter Setting
Parameters for Function Selection
Parameter
No.
Setting
range
Parameter Name Function/Description
Default setting is shown by [
]
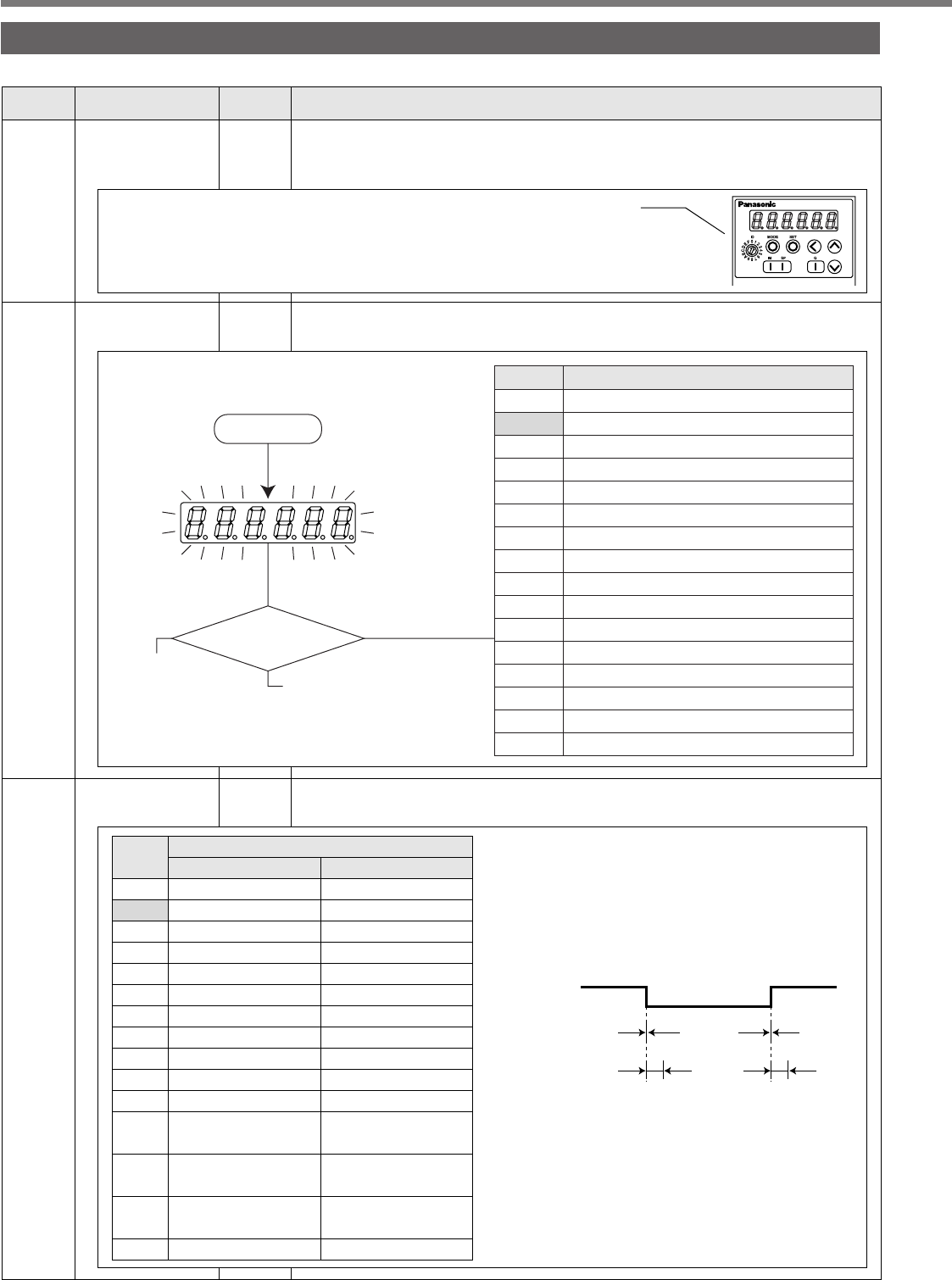
01 0 – 15LED display at
power up
In the initial condition after turning ON the control power, the following data displayed
on the 7-segment LED can be selected.
Power ON
Setting of Pr01
Flashing during initialization
(about 2 seconds)
Setting
value
Description
0
[1]
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Positional deviation
Motor revolving speed
Torque output
Control mode
I/O signal status
Error cause/record
Software version
Alarm
Regenerative load ratio
Overload load ratio
Inertia ratio
Feedback pulse sum
Command pulse sum
External scale deviation
External scale feedback pulse sum
Motor auto recognition
See page 56 "Front Panel Key Operations and Display".
00 0 – 15
[1]
Axis address In communications with a host device such as a personal computer that uses
RS232C/485 with multiple axes, you should identify to which axis the host accesses
and use this parameter to confirm axis address in terms of numerals.
• At power on, settings of the rotary switch ID on the front panel (0 – F) will be
programmed into parameters of the driver.
• Settings of Pr00 can be changed only by means of the rotary switch ID.
02 0 – 14Control mode Select the control mode of the servo driver.
0
[1]
2
3
4
5
6
7
8
9
10
11
12
13
14
Control mode
The 1st Mode The 2nd Mode*1
Position control
Speed control
Torque control
Position
Position
Speed
Semi-closed control
Full-closed control
Hybrid control
Speed
Speed
High-stiff equipment
position control
Low-stiff equipment
position control
Low-stiff equipment
speed control
Second full-closed control
–
–
–
Speed control
Torque control
Torque control
–
–
–
External encoder control
Semi-closed control
–
–
–
–
The 1st The 2nd
Closed
Open
C-MODE
10 ms or longer 10 ms or longer
Open
The 1st
*1 A special control mode focused on the full-closed
specification. For details, refer to “Full-Closed
Control” volume on Page 000.
*2 When composite mode (Pr02 = 3,4,5,9,10) is set,
you can switch the 1st and 2nd modes with the
control mode switch input (C-MODE).
<Caution>
Enter a command after 10ms or longer have passed
since C-MODE was entered.
Do not enter any command on position, speed or
torque.
Setting
value