



















153
[Connections and Settings in Torque Control Mode]
Connections and Settings in
Torque Control Mode
T
he motor decelerates and stops as the dynamic brake (DB) is
operated. The motor will be in free condition after it stops.
Free running, the motor decelerates and stops. The motor
will be in free condition after it stops.
In this case, if you shut off the main power during Servo ON, it
will be SERVO-OFF without a trip. Then, when the main pow-
er supply turns ON again, it will be recovered to Servo ON.
Shutting off main power during Servo ON will activate ab-
normal main power supply under-voltage (alarm code
No.13) and cause a trip.
65 0 – 1 –Undervoltage
error response
at main power-off
The parameter sets whether to enable the “protection against main powe
r
source under-voltage” function when you shut down the main power o
f
main and control power supplies.
Refer to the timing chart “At Power ON” of Preparations volume on page 40.
66 0 – 1 –Dynamic breke
inhibition at
overtravel limit
The parameter sets driving conditions at decelerated operation after over
-
travel input inhibit (CCWL: connector CN X5 9-pin or CWL: connector CN
X5 8-pin) has been activated and enabled.
Setting value
0
[1]
Main Power Source Under-voltage Protection Action
Setting value
[0]
1
Driving Conditions from Deceleration to Stop
Parameter
No.
Setting
range
Parameter Name Unit Function/Description
Default setting is shown by [
]
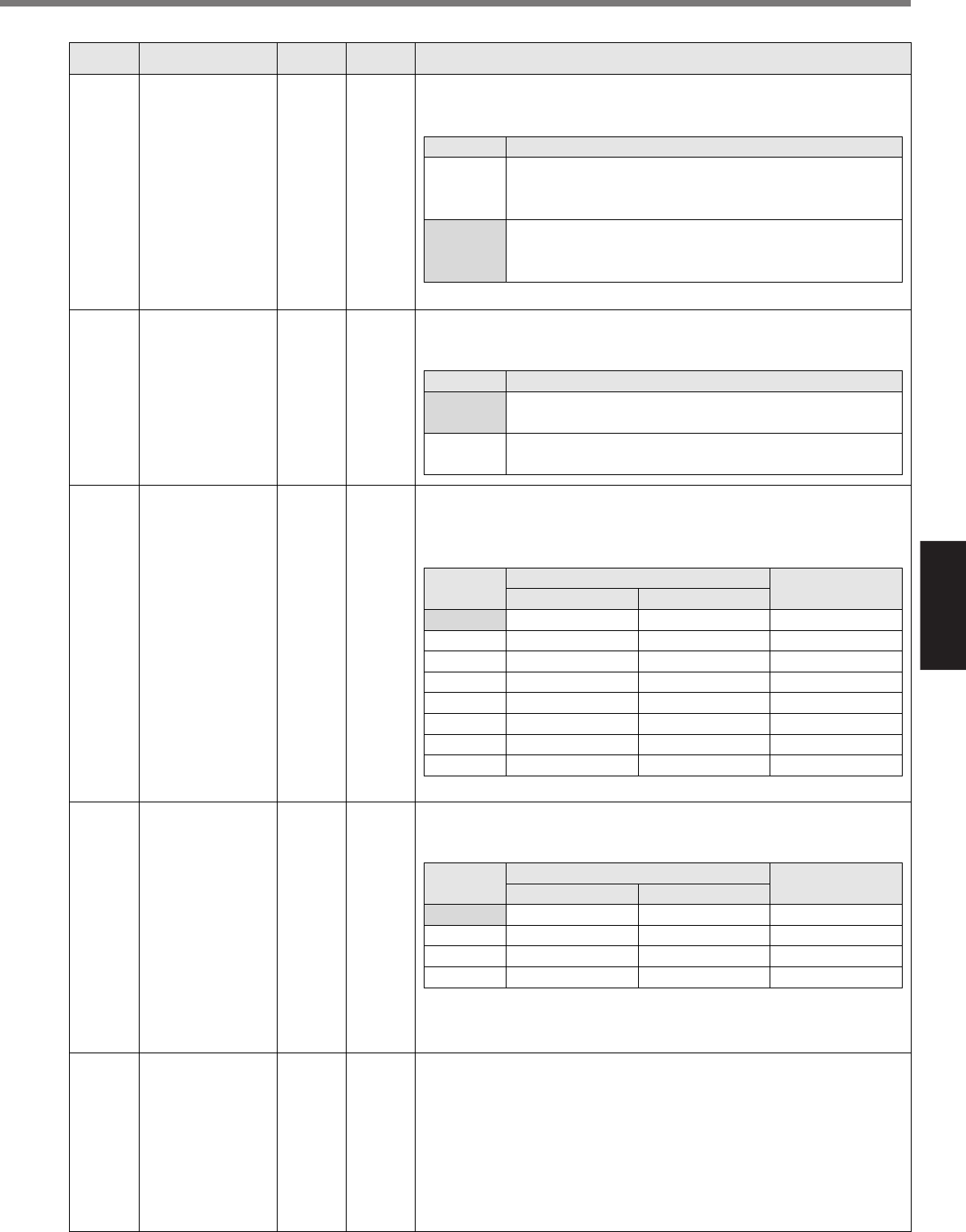
67 0 – 7 –Error response
at main power-off
The parameter sets:
(1) Driving conditions during deceleration and after stopping; and
(2) Processing to clear content of the deviation counter
after the main power source is shut off.
DB: Activation of dynamic brake
Setting
value
[0]
1
2
3
4
5
6
7
During Deceleration
DB
Free Run
DB
Free Run
DB
Free Run
DB
Free Run
After Stopped
DB
DB
Free
Free
DB
DB
Free
Free
Driving Conditions
Content of Deviation
Counter
Clear
Clear
Clear
Clear
Retention
Retention
Retention
Retention
68 0 – 3 –Error response
action
The parameter sets driving conditions during deceleration or following
stop, after any of protective functions of the driver has been activated and
alarm has been generated.
(DB: Activation of dynamic brake)
See also “When Abnormality (Alarm) Occurs (Serve ON Command State)
”
of the timing chart, Preparations volume on page 41.
Setting
value
[0]
1
2
3
During Deceleration
DB
Free Run
DB
Free Run
After Stopped
DB
DB
Free
Free
Driving Conditions
Content of Deviation
Counter
Clear
Clear
Clear
Clear
69 0 – 7
[0]
–Sequence at
Servo-OFF
• The parameter sets:
1) Driving conditions during deceleration or after stop
2) Processing to clear the deviation counter
following Servo off (SRV-ON signal: CN X5 29-pin turns On ‡ Off).
• A relationship between setting of Pr69 and driving conditions/deviation
counter processing conditions is similar to that of Pr67 (Sequence a
t
Main Power Off).
• See also “Serve On/Off Operation When the Motor Stops” of the timing
chart of Preparations volume on page 42.