



















Chassis Assembly
Flip the top plate over. The screws will be visible, and the standoffs will be underneath (and you should have a hole
in the lower right corner).
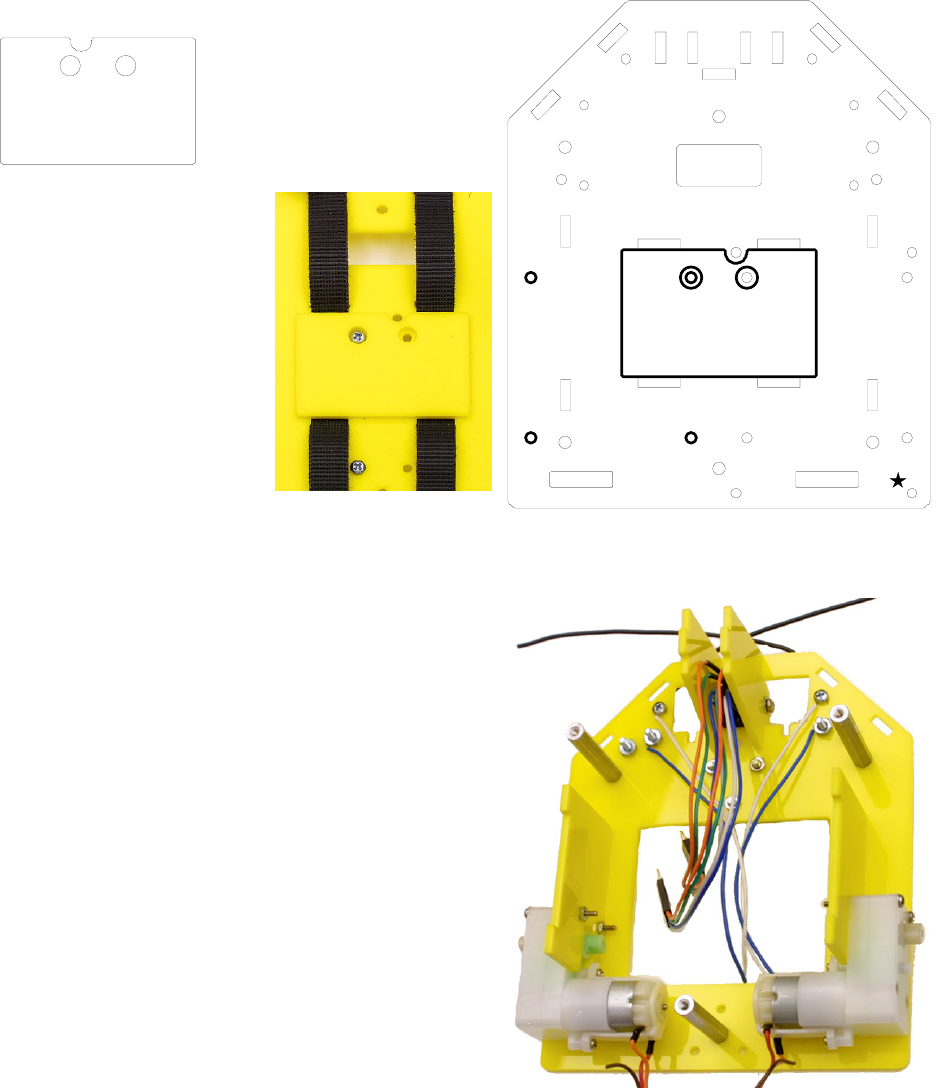
Find this piece (the battery spacer), and hold it like this:
You will mount this to what is
the underside of the top plate
(which is now face up since you
flipped it over!)
Stick the two mounting squares
onto the battery spacer. Then,
flip the spacer over and attach it
to the top plate, as shown on the
far right. The battery spacer
will fit between the slots and
the holes will be aligned.
Cut the velcro strap in half (into
two 8” strips). Feed each strip
through a pair of slots so that
the “hook” side of the velcro is
against the chassis and the ends
are on the side with the battery
spacer, as shown on the right.
Final Assembly
To assemble the robot:
Put the bottom plate on the ground with the caster down
and the standoffs up.
Place the light sensor assembly into the slots at the front of
the robot, as indicated at the top of the picture on the right.
The angled edge will go toward the interior of the robot.
Place the tabs of the motor assemblies into the slots on the
bottom plate, with the motors resting on the bottom plate
and oriented as shown in the picture on the right.
Hold the top plate with its standoffs sticking up. Feed the
wires from the light sensors and bumpers through the
rectangular hole near the front of the top plate. Align the
slots in the top plate with the tabs from the motor and light
sensor assemblies.
Hardware:
3 6-32 x 3/8” machine screws
2 small (wood) screws
4 4-40 x 1/4” screws
Fasten the 6-32 x 3/8” machine screws through the top plate and into the standoffs.
Attach the wheels to the motors and secure using the small screws.
Place the ARC board on the standoffs mounted to the top plate, oriented so that the switch is in the corner. Attach
the board to the standoffs using the 4-40 x 1/4” screws.
11-3-2005 17