



















Setup & Operation 5. Motion Range
5.1.1 Max. Pulse Range of Joint #1
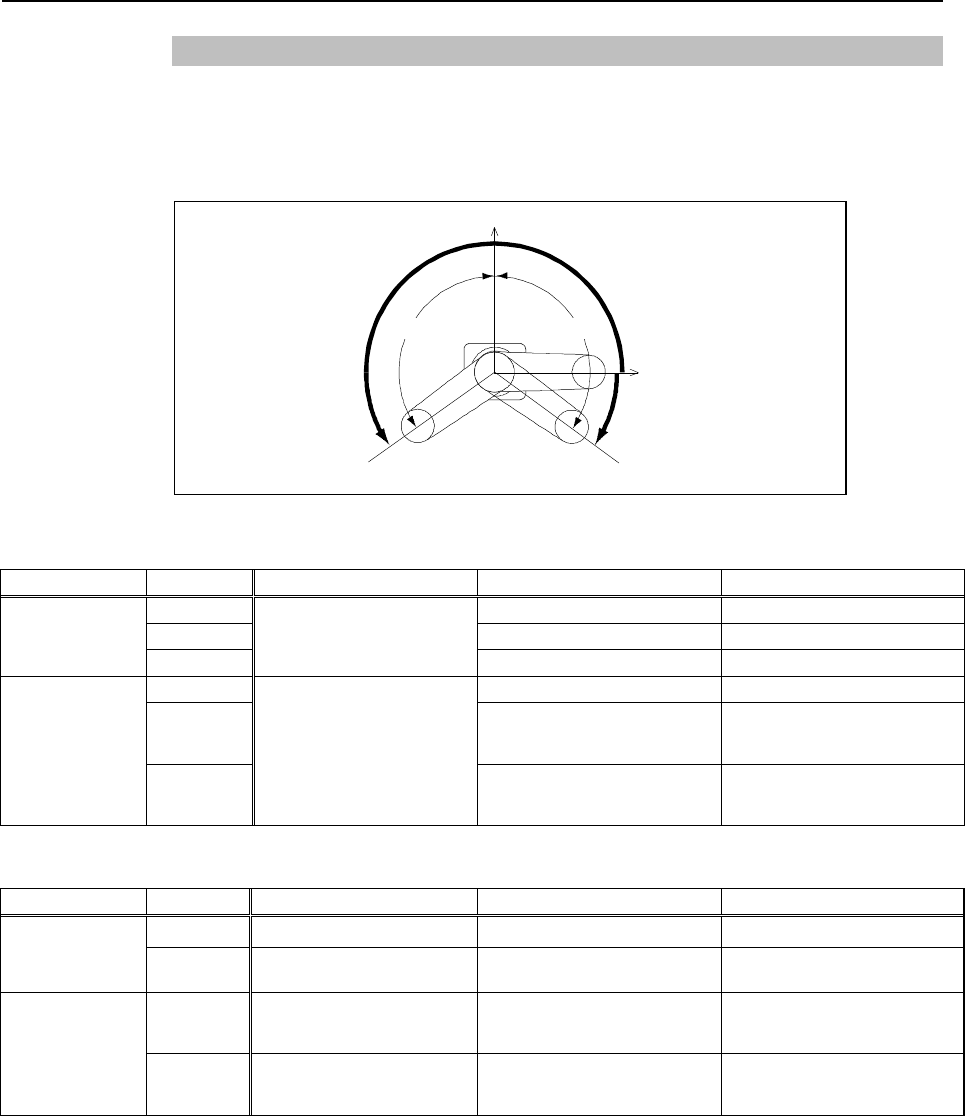
The 0 (zero) pulse position of Joint #1 is the position where Arm #1 faces toward the
positive (+) direction on the X-coordinate axis.
When the 0 pulse is a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (-).
+Y
+X 0 pulse
B B
A
A
Table Top Mounting
Arm Standard -R -L
25
− −
30
−125 ~ 150 / −125 ~ 150 −150 ~ 125 / −150 ~ 125
A
Max. Motion
Range
35
±140 / ±140
−110 ~ 165/ −110 ~ 165 −165 ~ 110 / −165 ~ 110
25
− −
30
−1019449 ~ 6990507
/
−1019449 ~ 6990507
−1747627 ~ 6262329
/
−1747627 ~ 6262329
B
Max. Pulse
Range
35
−1456356 ~ 6699236
/
−1456356 ~ 6699236
−582542 ~ 7427413
/
−582542 ~ 7427413
−2184533 ~ 5825422
/
−2184533 ~ 5825422
Multiple Mounting
Arm Standard -R -L
30
±115 / ±115
− −
A
Max. Motion
Range
35
±120/ ±120
−105 ~ 130 / −105 ~ 130 −130 ~ 105 / −130 ~ 105
30
−728178 ~ 5971058
/
−728178 ~ 5971058
− −
B
Max. Pulse
Range
35
−873813 ~ 6116693
/
−873813 ~ 6116693
−436907 ~ 6407965
/
−436907 ~ 6407965
−1165085 ~ 5679787
/
−1165085 ~ 5679787
48 G3 Rev.1