



















Setup & Operation 5. Motion Range
5.1.2 Max. Pulse Range of Joint #2
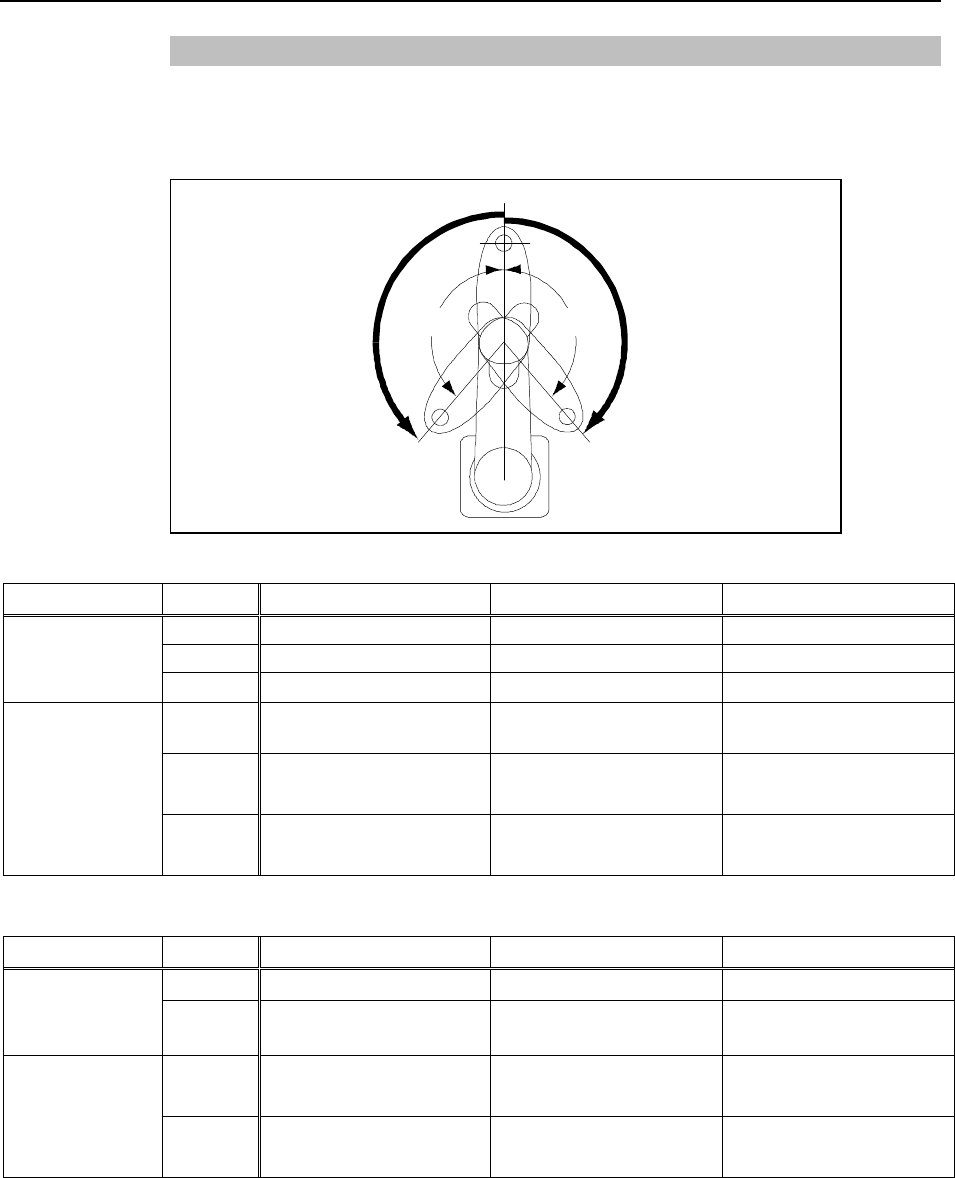
The 0 (zero) pulse position of Joint #2 is the position where Arm #2 is in-line with Arm #1.
With the 0 pulse as a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (-).
B B
0 pulse
A A
Table Top Mounting
Arm
Standard
-R -L
25
±141 / ±137
− −
30
±142 / ±141
−135 ~ 150 / −135 ~ 145 −150 ~ 135 / −145 ~ 135
A
Max. Motion
Range
35
±142 / ±142
−120 ~ 165 / −120 ~ 160 −165 ~ 120 / −160 ~ 120
25
−
2566827 ~ 2566827
/
−2494009 ~ 2494009
− −
30
−
2585031 ~ 2585031
/
−2494009 ~ 2494009
−2457600 ~ 2730667
/
−2457600 ~ 2639645
−2730667 ~ 2457600
/
−2639645 ~ 2457600
B
Max. Pulse
Range
35
−
2585031 ~ 2585031
/ 2585031
~ 2585031
−2184533 ~ 3003733
/
−2184533 ~ 2912711
−3003733 ~ 2184533
/
−2912711 ~ 2184533
Table Top Mounting
Arm
Standard
-R -L
30
±135 / ±135
− −
A
Max. Motion
Range
35
±142 / ±142
−120 ~ 160 / −120 ~ 150 −160 ~ 120 / −150 ~ 120
30
−
2457600 ~ 2457600
/
−2457600 ~ 2457600
− −
B
Max. Pulse
Range
35
−
2585031 ~ 2585031
/
−2585031 ~ 2585031
−2184533 ~ 2912711
/
−2184533 ~ 2730667
−2912711 ~ 2184533
/
−2730667 ~ 2184533
G3 Rev.1 49