



















Setup & Operation 5. Motion Range
5.2.1 Setting the Mechanical Stops of Joints #1 and #2
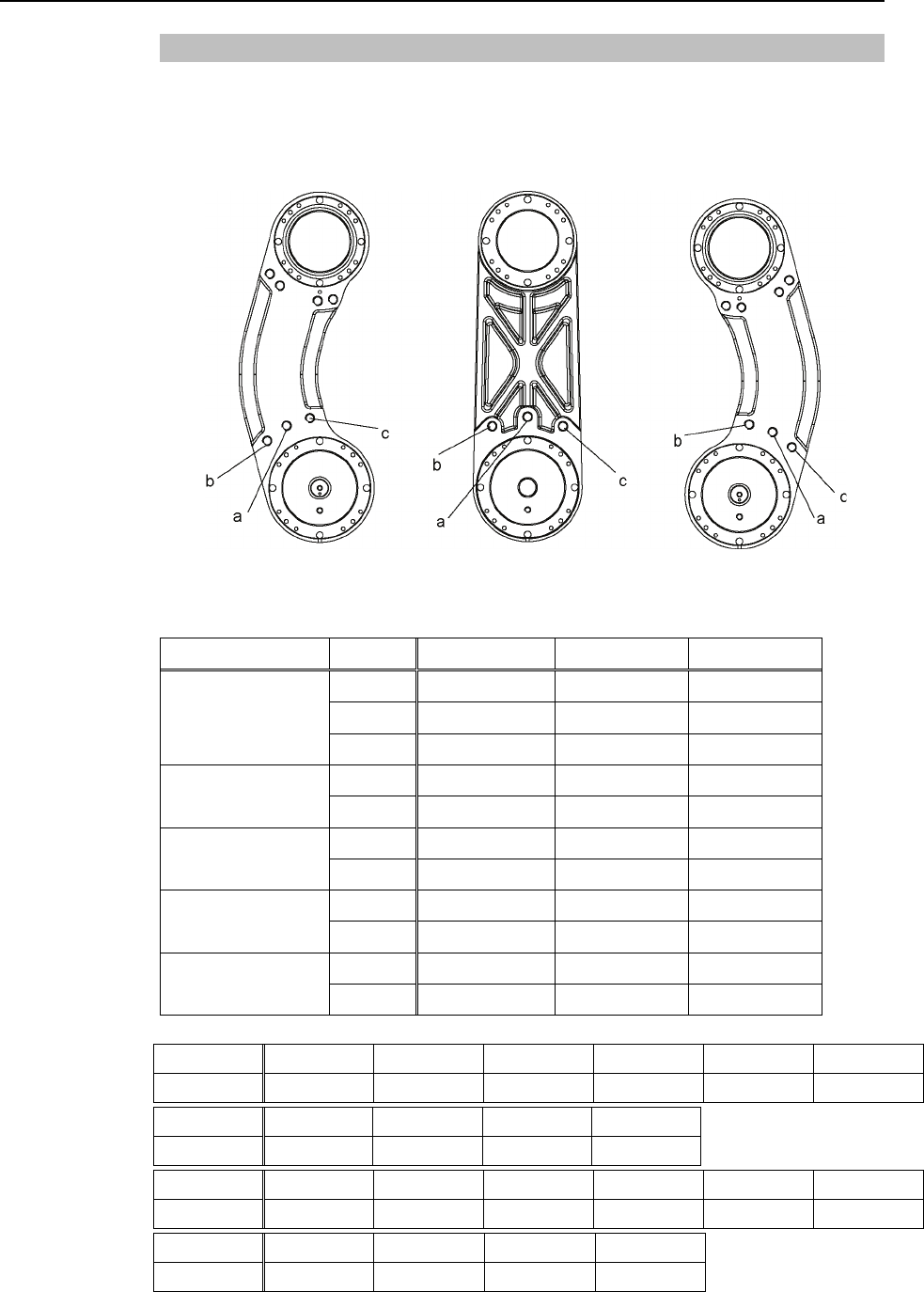
Both Joints #1 and #2 have threaded holes in the positions corresponding to the angle for
the mechanical stop settings. Install the bolts in the holes corresponding to the angle that
you want to set.
R L
Joint #1 Mechanical Stops
Views from the bottom of Arm #1
Model Arm a b c
250
±140°
-110°
+110°
300
±140°
-110°
+110°
G3-**1S/C
350
±140°
-110°
+110°
300
-125°
~ +150° -105°
+130°
G3-**1S/C-R
350
-110°
~ +165° -90°
+145°
300
-150°
~ +125° -130°
+105°
G3-**1S/C-L
350
-165°
~ +110° -145°
+90°
300
±115°
-85°
+85°
G3-**1SM/CM
350
±120°
-90°
+90°
300
-130°
~ +105° -100°
+75°
G3-**1SM/CM-R
350
-105°
~ +130° -75°
+100°
Setting Angle
+75°
+85° +90° +100° +105° +110°
Pulse Value
2184533
2475805 2621440 2912711 3058347 3203982
Setting Angle
+140°
+145°
+150° +165°
Pulse Value
4077796
4223431
4369067 4805973
Setting Angle
-75° -85° -90° -100° -105° -110°
Pulse Value
-2184533 -2475805 -2621440 -2912711 -3058347 -3203982
Setting Angle
-140° -145° -150°
+165°
Pulse Value
-4077796 -4223431 -4369067 -4805973
(°: degree)
52 G3 Rev.1