



















HRView Function Manual 3. Controller Parameter Setup
3-3
3.1. Hi3 Controller
(1) To use Ethernet: Ethernet is not available.
(2) For RS-232C use:
Condition setup and controller parameter should be the same as follows. The
Baudrate of the Serial Port 1 should have the same setup as HRView setup. However,
the rest of the communication options should be the same as follows.
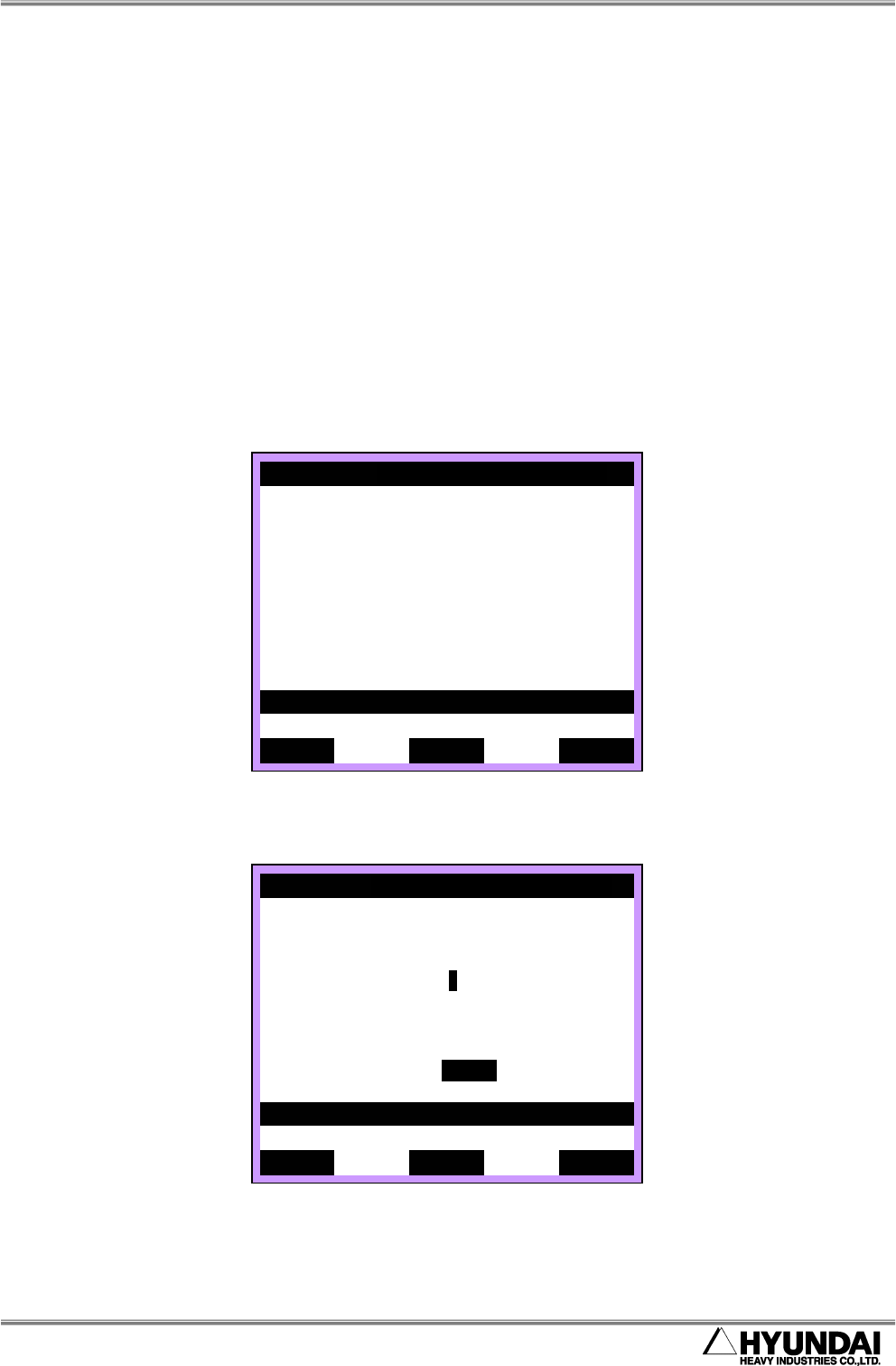
Constant Setup Group (1) → 『13: Serial Port』 → 『3: Serial Port 1』
Condition Set → 『27: Serial Port 1』: Set as FileMng
08:09:05 *** Serial Port 1 *** A:0 S:4
Press [Enable]+[Arrow].
>_
Save
Baudrate = <38400,19200,9600,4800,2400>
Character length = <7,8> bit
Stop bit = <1,2> bit
Parity bit = <Disable,Odd,Even>
Echo = <Disable,Enable>
08:09:05 *** Condition Set *** A:0 S:4
Press [Enable]+[Arrow].
>_
Service
Previous
Next
Done
1: Mode =<1Step,1Cycle,Continuous>
2: Start=<Internal,External,Remote>
3: External program =<Disable,Enable>
4: Robot lock =<Disable,Enable>
7: Search range =[0.0]
8: Search reference Pt. record=<Off,On>
9: Speed rate=[100] Gun =<DSBL,ENBL>
13: Rec speed type=<Standard,[%],[mm/s]>
23: Step go/back max.speed = [250]mm/s
27: Serial port #1 =<FileMng,Sens>